
一、项目背景
随着机器人技术的不断发展,履带式和四足式机器人在各自的应用领域都展现出了独特的优势。履带式机器人在平坦或稍崎岖的地貌上能够保持较高的行进速度,而四足机器人则在跨越障碍和应对复杂地形方面表现出色。本项目旨在开发一款履带四足复合机器人,结合两种行进模式的优点,以适应更多样的应用场景和地形。
二、项目目标
1. 硬件设计:开发一套基于ESP32的履带四足复合机器人硬件平台,支持两种行进模式的切换。
2. 功能实现:
- 支持四足行进模式和履带行进模式的切换。
- 支持8个自由度(DOF)的四足运动控制。
- 支持通过直流电机驱动的履带机构。
- 集成六轴加速度传感器、OLED屏幕、RGB灯珠、蜂鸣器等硬件资源。
3. 软件开发:编写适用于该硬件平台的控制软件,实现运动控制和用户交互。
4. 测试验证:通过实验室测试和实际场景测试,验证机器人的性能和可靠性。
三、项目意义
1. 教育意义:为高校和培训机构提供一个实践平台,帮助学生和爱好者学习嵌入式系统开发、机器人运动控制和机械设计。
2. 技术探索:通过开发履带四足复合机器人,探索履带式和四足式机器人技术的结合,为后续更复杂机器人的开发积累经验。
3. 应用拓展:履带四足复合机器人具有广泛的应用前景,可应用于教育、科研、工业自动化和娱乐等领域。
四、项目功能
1. 行进模式切换:
- 支持四足行进模式和履带行进模式的切换。
2. 运动控制:
- 支持8个自由度(DOF)的四足运动控制。
- 支持通过直流电机驱动的履带机构。
3. 传感器集成:
- 集成六轴加速度传感器,用于姿态检测。
4. 用户交互:
- 集成OLED屏幕,用于显示信息。
- 集成RGB灯珠和蜂鸣器,用于状态指示和报警。
5. 远程控制:
- 支持通过WIFI进行远程控制。
- 提供基于Android的远程控制App。
五、硬件设计
1. 主控芯片:ESP32-WROVER-E(V2.0版本为ESP32-PICO-D4),支持WIFI和蓝牙通信。
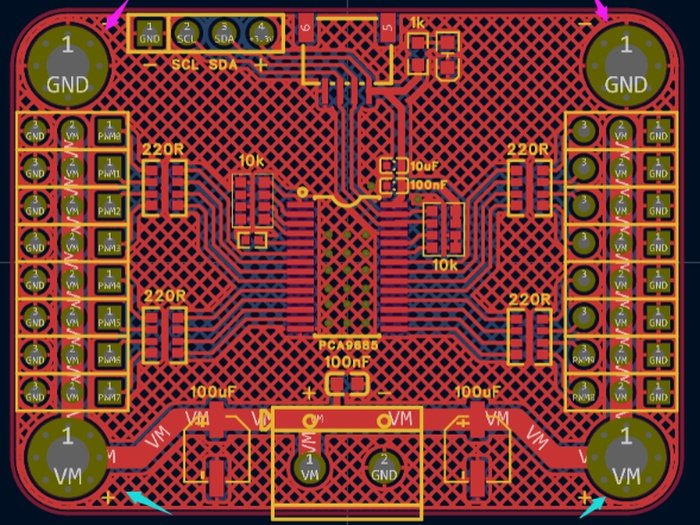
2. 电机驱动:
- 6路串行总线舵机接口,采用74HC126D实现UART全双工转半双工。
- 4路直流电机驱动,采用RZ7899替代TB6612FNG。
3. 传感器:
- 集成六轴加速度传感器MPU6050。
4. 显示与指示:
- 0.96寸OLED屏幕接口。
- 3颗WS2812B-2020 RGB灯珠。
- 微型无源蜂鸣器。
5. 拓展接口:
- 2路IIC接口。
- 1路WS2812B灯珠接口。
- 1处串口接口,用于外接卫星定位模块。
六、软件设计
1. 底层驱动:
- 串行总线舵机通信。
- 直流电机驱动。
- 六轴加速度传感器通信。
- OLED屏幕驱动。
- 拨轮编码器读取。
- WS2812B-RGB灯珠驱动。
- 蜂鸣器驱动。
- WIFI通信配置。
2. 运动控制:
- 单腿正解(FK)和逆解(IK)。
- 姿态逆解。
- 足端摆线轨迹计算。
- Trot步态模式和Walk步态模式。
- VMC算法(伪闭环,待测试)。
3. 用户交互:
- 基于Android的远程控制App,支持WIFI通信和TCP协议。
| 买家 | 规格或版本 | 评分 | 评价 | 时间 |