
一、项目背景
四足机器人因其出色的灵活性和适应性,在机器人领域受到广泛关注。并联臂四足机器狗结合了并联机构和四足机器人的优点,能够实现更复杂的运动控制和更高的负载能力。本项目旨在开发一款基于STM32F103C8T6的并联臂四足机器狗,通过MPU6050传感器实现姿态控制,支持多种运动模式。
二、项目目标
1. 硬件设计:开发一套基于STM32F103C8T6的并联臂四足机器狗硬件平台,包括主控芯片、传感器、电机驱动和通信模块。
2. 功能实现:
- 支持多种运动模式,如行走、跑步、转向等。
- 使用MPU6050传感器实现姿态控制。
- 支持通过NRF24L01无线模块进行遥控。
3. 软件开发:编写适用于该硬件平台的控制软件,实现运动控制和姿态反馈。
4. 测试验证:通过实验室测试和实际场景测试,验证机器狗的性能和可靠性。
三、项目意义
1. 教育意义:为高校和培训机构提供一个实践平台,帮助学生和爱好者学习嵌入式系统开发、运动控制和传感器应用。
2. 技术探索:通过开发并联臂四足机器狗,探索并联机构和四足机器人技术的结合,为后续更复杂机器人的开发积累经验。
3. 应用拓展:并联臂四足机器狗具有广泛的应用前景,可应用于教育、科研、娱乐等领域。
四、项目功能
1. 运动控制:
- 支持多种运动模式,如行走、跑步、转向等。
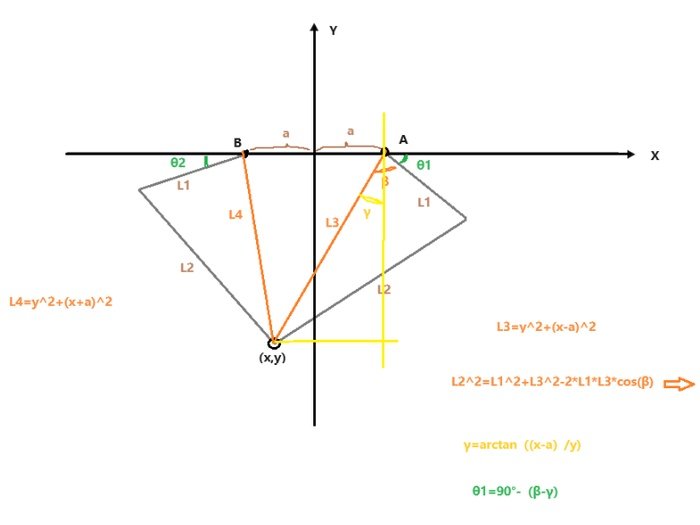
- 使用摆线方程生成足端轨迹规划。
- 通过运动学逆解计算舵机转动角度。
2. 姿态控制:
- 使用MPU6050传感器反馈数据实现姿态控制。
3. 无线遥控:
- 支持通过NRF24L01无线模块进行遥控。
4. 3D打印结构:
- 提供3D打印的机械结构文件,方便爱好者自行打印和组装。
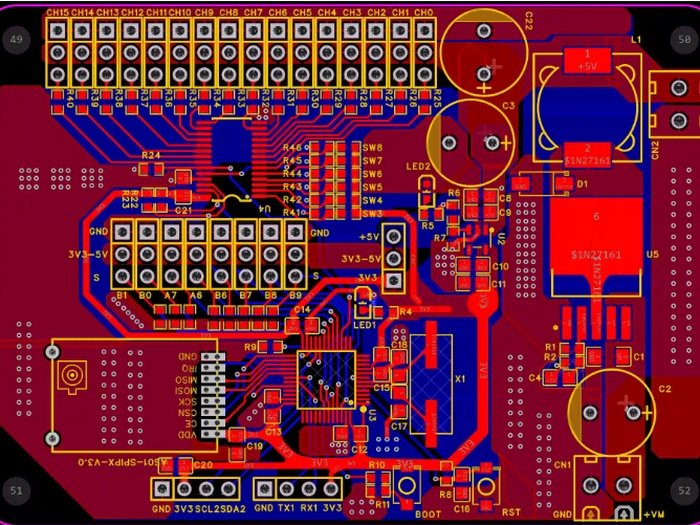
五、硬件设计
1. 主控芯片:STM32F103C8T6,支持多种外设接口。
2. 传感器:MPU6050,用于姿态检测。
3. 电机驱动:通过PCA9685或直接PWM输出驱动舵机。
4. 通信模块:NRF24L01无线模块,用于遥控。
5. 电源管理:7.4V-12V输入,通过XL4005E1输出5V给舵机供电,再通过RT9013输出3.3V给单片机供电。
六、软件设计
1. 运动控制:
- 生成摆线方程,规划足端轨迹。
- 使用运动学逆解计算舵机转动角度。
2. 姿态控制:
- 使用MPU6050传感器反馈数据实现姿态控制。
3. 无线遥控:
- 支持通过NRF24L01无线模块接收遥控指令。
4. 用户界面:
- 提供简单的用户界面,方便用户控制机器狗的运动模式。
| 买家 | 规格或版本 | 评分 | 评价 | 时间 |