
一、项目背景
随着3D打印技术的不断发展,其在机械制造领域的应用越来越广泛。3D打印技术不仅可以快速制造复杂的机械结构,还能显著降低制造成本。本项目旨在开发一款基于3D打印技术的机械臂,通过结合开源硬件和软件,实现低成本、高性能的机械臂解决方案。该机械臂将具备多自由度运动能力,支持手机示教和图形化编程,适用于教育、科研和工业应用。
二、项目目标
1. 硬件设计:开发一套基于3D打印技术的机械臂硬件平台,包括机械结构、控制器和电机驱动部分。
2. 功能实现:
- 支持多自由度运动,最大末端负载2.4kg,臂长765mm,重复定位精度0.5mm。
- 支持手机示教和图形化编程。
- 支持联网远程监控。
3. 软件开发:编写适用于该硬件平台的控制软件,实现运动控制和用户交互功能。
4. 测试验证:通过实验室测试和实际场景测试,验证机械臂的性能和可靠性。
三、项目意义
1. 教育意义:为高校和培训机构提供一个实践平台,帮助学生和爱好者学习机械设计、嵌入式系统开发和3D打印技术。
2. 技术探索:通过开发3D打印机械臂,探索3D打印技术在机械制造中的应用,为后续更复杂机械系统的开发积累经验。
3. 应用拓展:3D打印机械臂具有广泛的应用前景,可应用于教育、科研、工业自动化等领域。
四、项目功能
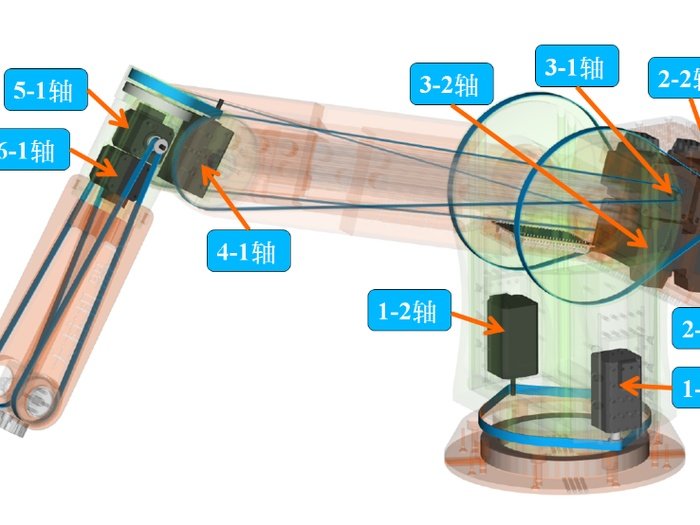
1. 机械结构:
- 使用3D打印技术制造机械臂的主体结构,结合铝型材和同步带,实现低成本、高性能的设计。
- 前三关节采用双电机结构,提高负载能力和精度。
2. 控制器:
- 主控制器采用ESP32-S3芯片,支持WiFi和蓝牙功能,能够输出100KHz脉冲,控制6轴机械臂。
- 8路输入和8路输出,带光电耦合保护电路,方便外接电磁阀。
3. 电机驱动:
- 步进电机驱动采用TB67S109AFTG芯片,支持最大4A电流。
- 磁编码器使用MT6816CT-ACD,14位单圈绝对编码器,最高精度可达0.02°。
4. 软件功能:
- 主控板程序基于开源micropython,支持使用Python语言进行单片机程序开发。
- 驱动板编程基于ESP-IDF库,使用C语言编写。
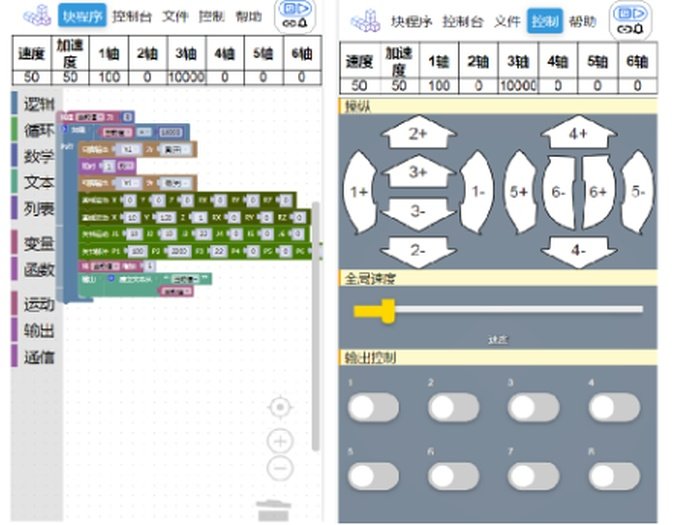
- 手机控制软件基于开源blockly和bipes编写,支持图形化编程和手机示教。
五、硬件设计
1. 机械结构:
- 使用FreeCAD软件进行3D模型图绘制,支持运动仿真和简单的有限元仿真。
- 机械臂主体采用3D打印技术制造,结合铝型材和同步带,实现低成本、高性能的设计。
2. 控制器:
- 主控制器采用ESP32-S3芯片,支持WiFi和蓝牙功能,能够输出100KHz脉冲,控制6轴机械臂。
- 8路输入和8路输出,带光电耦合保护电路,方便外接电磁阀。
3. 电机驱动:
- 步进电机驱动采用TB67S109AFTG芯片,支持最大4A电流。
- 磁编码器使用MT6816CT-ACD,14位单圈绝对编码器,最高精度可达0.02°。
六、软件设计
1. 主控板程序:
- 基于开源micropython,支持使用Python语言进行单片机程序开发。
2. 驱动板程序:
- 基于ESP-IDF库,使用C语言编写,支持脉冲控制和CAN通信控制。
3. 手机控制软件:
- 基于开源blockly和bipes编写,支持图形化编程和手机示教。
| 买家 | 规格或版本 | 评分 | 评价 | 时间 |