
一、项目背景
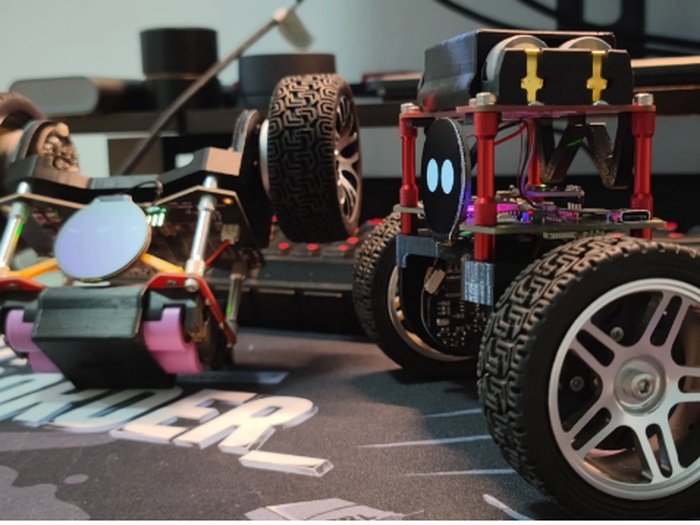
随着人工智能技术的快速发展,AI助手在智能家居、智能办公等领域的应用越来越广泛。桌面机器人作为一种小型化的智能设备,因其便携性和多功能性,受到越来越多的关注。本项目旨在开发一款AI控制的桌面机器人,具备智能旋钮的全功能,支持通过语音控制、手柄遥控和无线调参等多种交互方式,实现对智能家居设备的控制和机器人运动的精确控制。
二、项目目标
1. 硬件设计:开发一套基于ESP32S3的桌面机器人硬件平台,包括主控板、驱动板、屏幕板和电池板。
2. 功能实现:
- 支持X-Knob智能旋钮的全功能,实现对小米智能家居设备的控制。
- 支持手柄遥控控制(蓝牙)。
- 支持无线调参,通过SimpleFOCStudio进行参数调整。
- 支持小智AI控制,实现基于大模型语意理解的语音控制移动。
3. 软件开发:编写适用于该硬件平台的控制软件,实现与AI模型的通信和交互。
4. 测试验证:通过实验室测试和实际场景测试,验证桌面机器人的性能和可靠性。
三、项目意义
1. 教育意义:为高校和培训机构提供一个实践平台,帮助学生和爱好者学习嵌入式系统开发、AI技术和智能家居控制。
2. 技术探索:通过开发AI控制的桌面机器人,探索AI技术在低性能嵌入式设备上的应用,为后续更复杂系统的开发积累经验。
3. 应用拓展:桌面机器人具有广泛的应用前景,可应用于智能家居控制、智能办公和教育等领域。
四、项目功能
1. 智能旋钮功能:
- 支持X-Knob智能旋钮的全功能,实现对小米智能家居设备的控制。
2. 手柄遥控功能:
- 支持通过蓝牙手柄进行遥控控制。
3. 无线调参功能:
- 支持通过SimpleFOCStudio进行无线调参。
4. AI语音控制功能:
- 支持通过小智AI进行语音控制,实现基于大模型语意理解的移动控制。
5. 硬件特性:
- 主控板:ESP32-S3 WROOM-1U-N16R8。
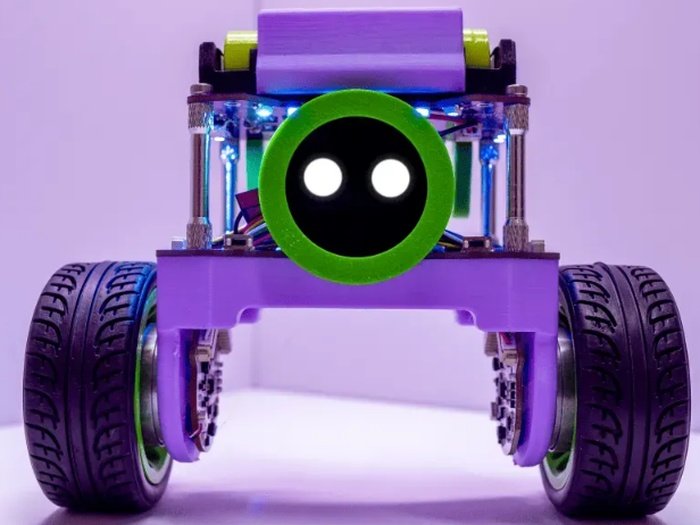
- 屏幕:240x240圆形LCD GC9A01 (1.28寸)。
- 磁编码器:MT6701CT。
- 无刷直流电机:3205b。
6. 3D打印结构件:
- 车架-3205b
- 车轮适配件_v0.2
- 电池卡扣+底座接口_v0.9
- 屏幕架_v0.4
- 支撑件_v0.1
五、硬件设计
1. 主控板:基于ESP32-S3 WROOM-1U-N16R8,支持WiFi通信和低功耗运行。
2. 驱动板:支持无刷直流电机的驱动和磁编码器的读取。
3. 屏幕板:240x240圆形LCD GC9A01 (1.28寸),用于显示状态信息。
4. 电池板:使用饭佬开源平衡车Super_Balance的电池板,支持充电功能。
5. 通信模块:通过WiFi实现与云端AI模型的通信。
六、软件设计
1. AI模型部署:
- 使用Docker和Node.js搭建自有服务器,实现与AI模型的通信。
2. 设备控制:
- 编写ESP32S3的固件,实现智能旋钮、手柄遥控和AI语音控制功能。
3. 通信协议:
- 开发适用于ESP32S3的通信协议,实现与云端服务器的数据传输。
4. 用户交互:
- 编写用户界面,实现智能旋钮、手柄遥控和AI语音控制功能。
| 买家 | 规格或版本 | 评分 | 评价 | 时间 |