一、项目背景
随着微型机器人技术的不断发展,其在教育、科研和工业领域的应用越来越广泛。微型机器人因其体积小、灵活性高、成本低等优点,被广泛应用于环境监测、医疗诊断、智能物流等领域。本项目旨在开发一款基于ESP8285的微型视觉控制振动机器人,通过Python和OpenCV实现路径规划和轨迹控制,为微型机器人技术的研究和应用提供新的思路和方法。
二、项目目标
1. 硬件设计:开发一套基于ESP8285的微型振动机器人硬件平台,包括振动电机驱动电路、电源管理电路和通信模块。
2. 功能实现:
- 实现机器人在视觉控制下的路径规划和轨迹控制。
- 实现机器人通过振动电机实现前进和转向功能。
3. 软件开发:编写适用于该硬件平台的控制软件,实现路径规划和轨迹控制功能。
4. 测试验证:通过实验室测试和实际场景测试,验证机器人的性能和可靠性。
三、项目意义
1. 教育意义:为高校和培训机构提供一个实践平台,帮助学生和爱好者学习嵌入式系统开发、计算机视觉技术和机器人技术。
2. 技术探索:通过开发微型视觉控制振动机器人,探索微型机器人技术的最新发展,如高精度视觉识别和路径规划。
3. 应用拓展:微型视觉控制振动机器人具有广泛的应用前景,可应用于教育、科研、工业自动化等领域。
四、项目功能
1. 视觉控制:
- 使用Python和OpenCV实现路径规划和轨迹控制。
2. 振动驱动:
- 使用两个振动电机实现机器人的前进和转向。
3. 电源管理:
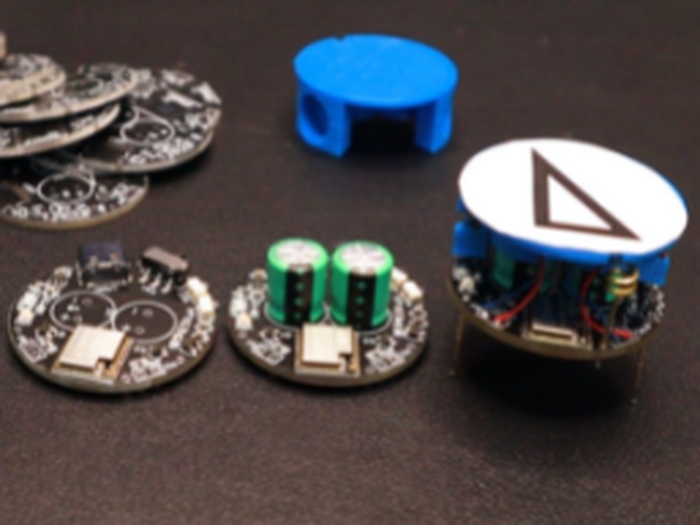
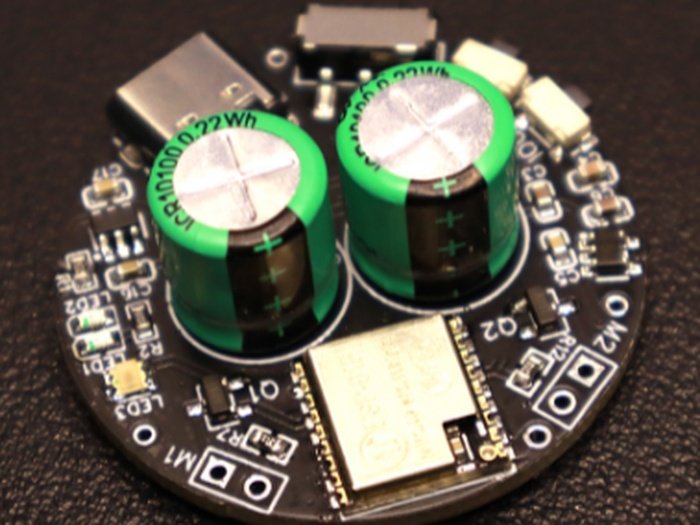
- 使用两粒电容形状的锂电池供电,主板集成串口转USB和充电电路。
4. 通信功能:
- 使用ESP8285实现WiFi通信,支持远程控制和数据传输。
5. 人机交互:
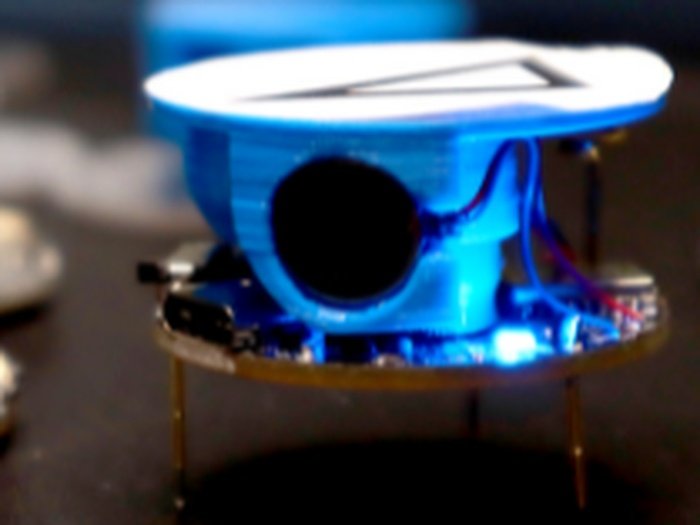
- 使用3D打印的盖子和按钮实现人机交互功能。
五、硬件设计
1. 主控芯片:ESP8285,支持WiFi通信和低功耗运行。
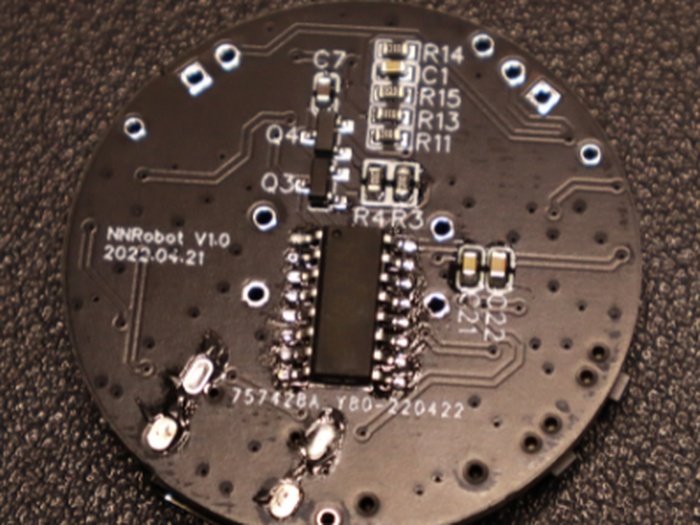
2. 振动电机驱动:使用两个MOS管驱动振动电机。
3. 电源管理:
- 使用两粒电容形状的锂电池供电。
- 主板集成串口转USB和充电电路。
4. 通信模块:使用ESP8285实现WiFi通信。
5. 人机交互:使用3D打印的盖子和按钮实现人机交互功能。
六、软件设计
1. 路径规划:
- 使用Python和OpenCV实现路径规划和轨迹控制。
2. 振动控制:
- 编写Arduino代码控制振动电机的驱动电路,实现机器人前进和转向。
3. 通信协议:
- 开发适用于ESP8285的通信协议,实现远程控制和数据传输。
4. 人机交互:
- 编写Arduino代码实现按钮和开关的控制功能。
| 买家 | 规格或版本 | 评分 | 评价 | 时间 |