一、项目背景
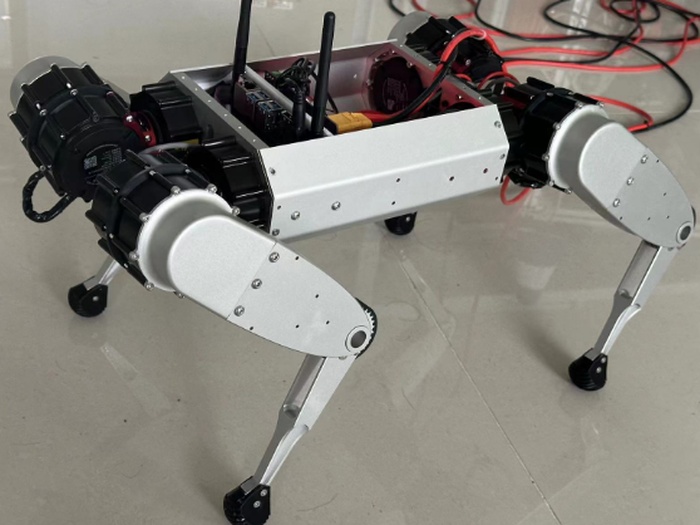
随着机器人技术的不断发展,仿生机器人因其出色的灵活性和适应性,逐渐成为机器人领域的研究热点。四足机器人能够在复杂地形上行走、奔跑和爬行,具有广泛的应用前景,如家庭服务、工业巡检、救援任务等。本项目旨在开发一款高性能的仿生四足机器狗,结合先进的控制技术、机械设计和电子系统,实现其在三维空间中的自由运动。
二、项目目标
1. 硬件设计:开发一套基于高性能计算机和微控制器的硬件平台,包括动力系统、控制系统、电源管理和通信系统。
2. 功能实现:实现机器狗的基本运动功能(前进、后退、左转、右转、跳跃等)和仿生步态,支持通过外部设备(如激光雷达和深度相机)进行环境感知。
3. 软件开发:编写适用于该硬件平台的控制软件,包括运动控制算法、通信协议、物联网集成等。
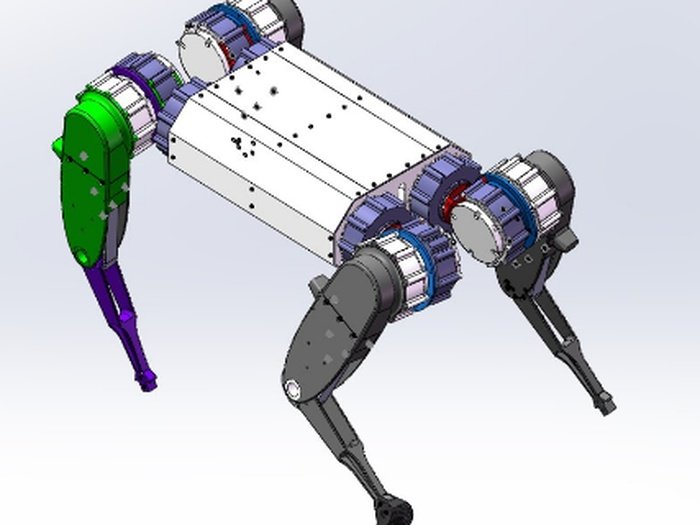
4. 机械设计:设计一套稳定的机械结构,采用铝合金材料进行CNC加工,确保机器狗的结构强度和耐用性。
、项目意义
1. 教育意义:为高校和培训机构提供一个高性能的四足机器人实验平台,帮助学生和爱好者学习机器人技术、嵌入式系统开发和机械设计。
2. 技术探索:通过开发高性能四足机器人,探索机器人运动控制、嵌入式系统设计和机械设计的结合,为后续更复杂机器人的开发积累经验。
3. 应用拓展:四足机器人具有良好的地形适应性和灵活性,可应用于家庭服务、工业巡检、救援任务等领域,具有广阔的应用前景。
四、项目功能
1. 动力系统:
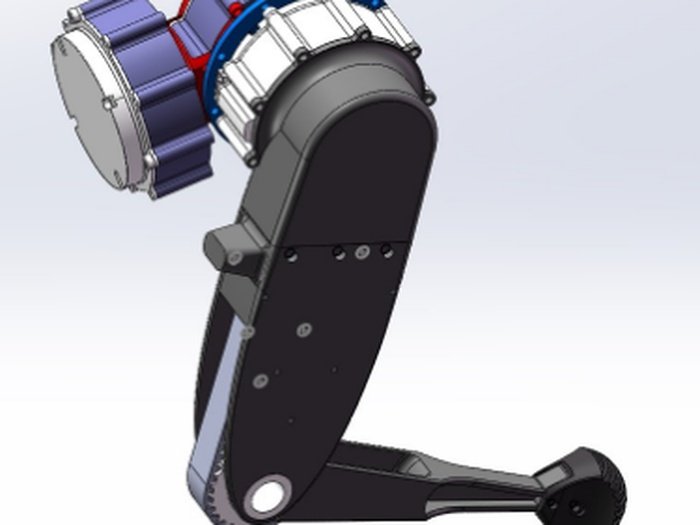
每条腿配备三个伺服无刷电机,确保腿部在三维空间中的灵活运动。
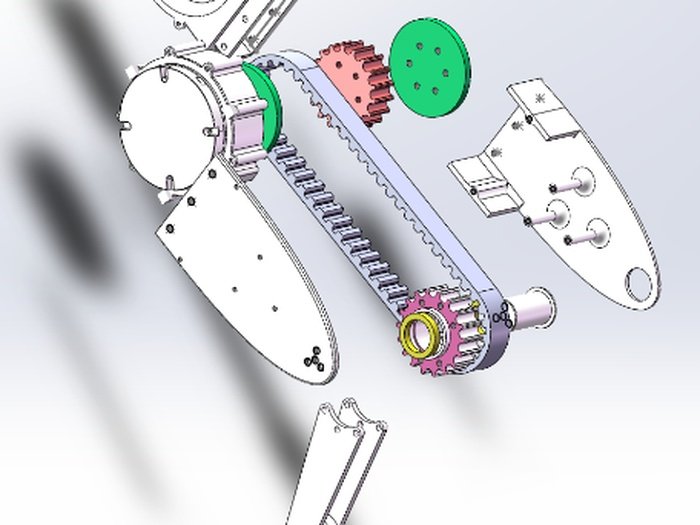
膝关节电机通过同步带传动设计,减少运动过程中的能量损耗。
2. 控制系统:
上位机:使用NVIDIA Orin NX高性能计算机,支持高算力应用。
下位机:由两颗STM32H7单片机组成,分别通过SPI与上位机通信,解析指令并控制电机。
3. 电源管理:
实现24V-19V、19V-5V和5V-3.3V的三路Buck开关降压稳压电路,带载纹波均在30mV以内。
4. 通信系统:
四根CAN总线实现1Mbps的通信速率,SPI总线支持16Mbps的速度,确保数据传输的高效稳定。
5. 软件系统:
上位机实现底层SPI发送程序和步态规划程序,同时开发了小米电机驱动库,支持通过ROS或C++进行控制。
物联网集成:通过MQTT协议,将机器狗的传感器数据上传至物联网平台,并在Web端进行可视化显示,增强用户体验。
6. 机械设计:
共设计79个零部件和276个螺栓孔位,经过百余次3D打印验证,确保设计的可行性与稳定性。
最终采用CNC加工的铝合金零件进行组装,提升机器狗的结构强度与耐用性。
五、硬件设计
1. 动力系统:
每条腿配备三个伺服无刷电机,确保腿部在三维空间中的灵活运动。
膝关节电机通过同步带传动设计,减少运动过程中的能量损耗。
2. 控制系统:
上位机:使用NVIDIA Orin NX高性能计算机,支持高算力应用。
下位机:由两颗STM32H7单片机组成,分别通过SPI与上位机通信,解析指令并控制电机。
3. 电源管理:
实现24V-19V、19V-5V和5V-3.3V的三路Buck开关降压稳压电路,带载纹波均在30mV以内。
4. 通信系统:
四根CAN总线实现1Mbps的通信速率,SPI总线支持16Mbps的速度,确保数据传输的高效稳定。
六、软件设计
1. 控制程序:
上位机实现底层SPI发送程序和步态规划程序,同时开发了小米电机驱动库,支持通过ROS或C++进行控制。
2. 物联网集成:
通过MQTT协议,将机器狗的传感器数据上传至物联网平台,并在Web端进行可视化显示,增强用户体验。
| 买家 | 规格或版本 | 评分 | 评价 | 时间 |