解魔方机器人设计
¥6999.00
累计销量 0
累计评价 0
包邮
景与行业现状
魔方自1974年由匈牙利建筑学家厄尔诺·鲁比克发明以来,已成为全球最受欢迎的益智玩具之一。随着世界魔方协会(WCA)的成立,魔方竞技运动蓬勃发展,目前三阶魔方速拧的世界纪录已达到惊人的3.13秒。与此同时,机器人技术作为当今世界最前沿的科技领域之一,正经历着前所未有的快速发展。
本智能魔方机器人源于第四届智能机器人创意大赛的竞赛需求,旨在突破传统人工解魔方的极限,实现更快速、更精准的自动化还原。该产品不仅展示了机器人技术在竞技领域的应用前景,更是多学科交叉融合的典范,涉及机械设计、计算机视觉、人工智能、自动控制等前沿技术。
产品价值与意义
- 技术创新:
- 突破人脑计算和手速极限,实现毫秒级解魔方算法
- 融合多摄像头视觉识别技术,色块识别准确率高达98%
- 采用高精度闭环步进电机控制,单次动作时间<0.8秒
- 教育价值:
- 为机器人教育提供绝佳实践平台
- 培养学生在机械、电子、编程等领域的综合能力
- 促进跨学科知识融合与创新思维培养
- 产业意义:
- 验证机器人精准控制技术的可行性
- 为工业自动化提供技术储备
- 推动人工智能在实时决策中的应用
系统架构与核心技术
1. 硬件系统
- 主控单元:
- STM32F103C8T6单片机(主控)
- Arduino Nano(辅助控制)
- 视觉系统:
- 4路FPV高清摄像头
- UU-DVR视频采集卡
- 支持SDK二次开发
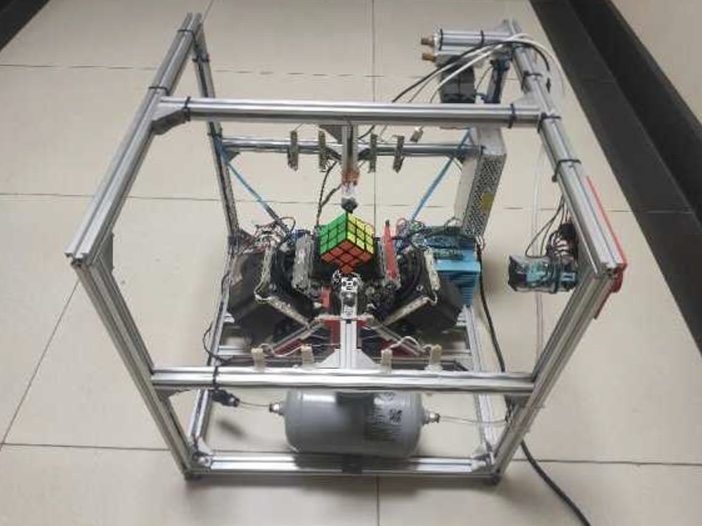
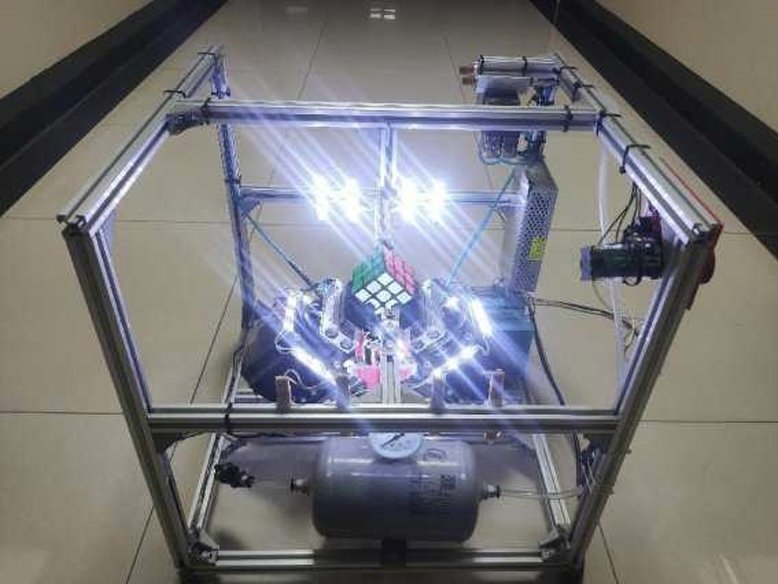
- 执行机构:
- 闭环步进电机套装(0.05°精度)
- 气动驱动模块
- 铝型材主体框架
- 辅助模块:
- 光电复位开关
- 稳压电源系统
- 通信接口模块
2. 软件系统
- 上位机程序:
- C#开发环境
- 基于SerialPort的串口通信
- 魔方求解算法(<1s计算时间)
- 下位机程序:
- STM32硬件串口通信
- 电机精准控制算法
- 动作序列执行程序
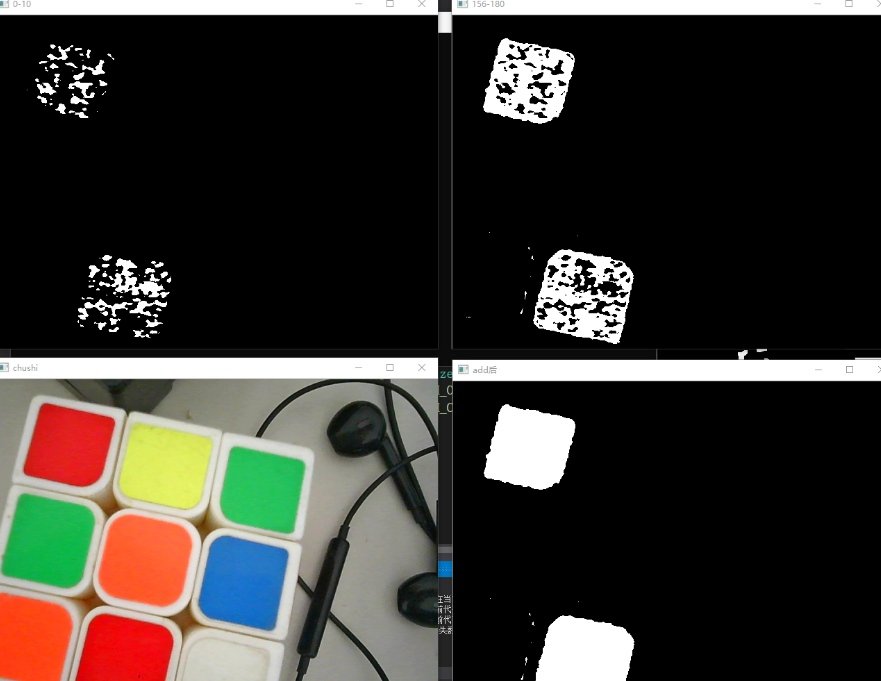
- 视觉识别:
- 多摄像头协同采集
- 色块分类算法(95%+准确率)
- 三维魔方状态重建
性能指标
- 速度表现:
- 完整还原时间≤60秒
- 单步执行时间≤1秒
- 算法计算时间≤1秒
- 精度要求:
- 色块识别准确率≥95%
- 电机定位精度±0.1°
- 动作成功率≥99%
- 稳定性:
- 连续工作≥100次无故障
- 抗干扰能力强
- 自适应机械容错设计
技术创新点
- 多摄像头协同视觉系统:
- 采用4路高清摄像头全方位采集
- 创新性色块识别算法
- 实时三维魔方状态建模
- 混合控制架构:
- STM32+Arduino双控制系统
- 硬件级动作优化
- 毫秒级响应延迟
- 高效求解算法:
- 改进的两阶段算法
- 平均步数≤80步
- 支持多种魔方变种
- 模块化机械设计:
- 快速拆装结构
- 可扩展执行机构
- 自适应夹持系统
应用场景
- 教育领域:
- 高校机器人课程教学平台
- STEM教育示范项目
- 科技创新竞赛平台
- 娱乐展示:
- 科技馆互动展品
- 商业活动表演
- 魔方爱好者训练工具
- 技术验证:
- 机器人控制算法验证
- 机器视觉应用测试
- 实时系统开发平台
发展前景
本智能魔方机器人不仅是一项技术创新,更是未来智能机器人发展的缩影。随着技术的不断升级,我们计划:
- 开发更快速的求解算法,目标突破20秒还原大关
- 优化机械结构,实现更柔顺的动作控制
- 增加深度学习技术,提升复杂情况的处理能力
- 拓展至更高阶魔方(4阶、5阶等)的自动还原
我们相信,这款产品将为机器人技术的发展注入新的活力,同时也为魔方爱好者带来前所未有的体验。期待与各界合作伙伴共同推动这一技术的进步与应用。
颜色捕捉

| 买家 | 规格或版本 | 评分 | 评价 | 时间 |