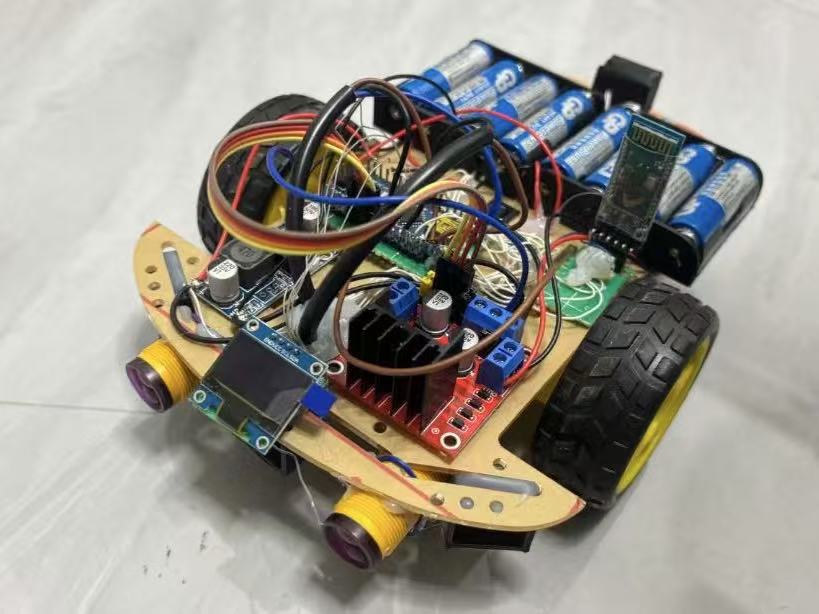
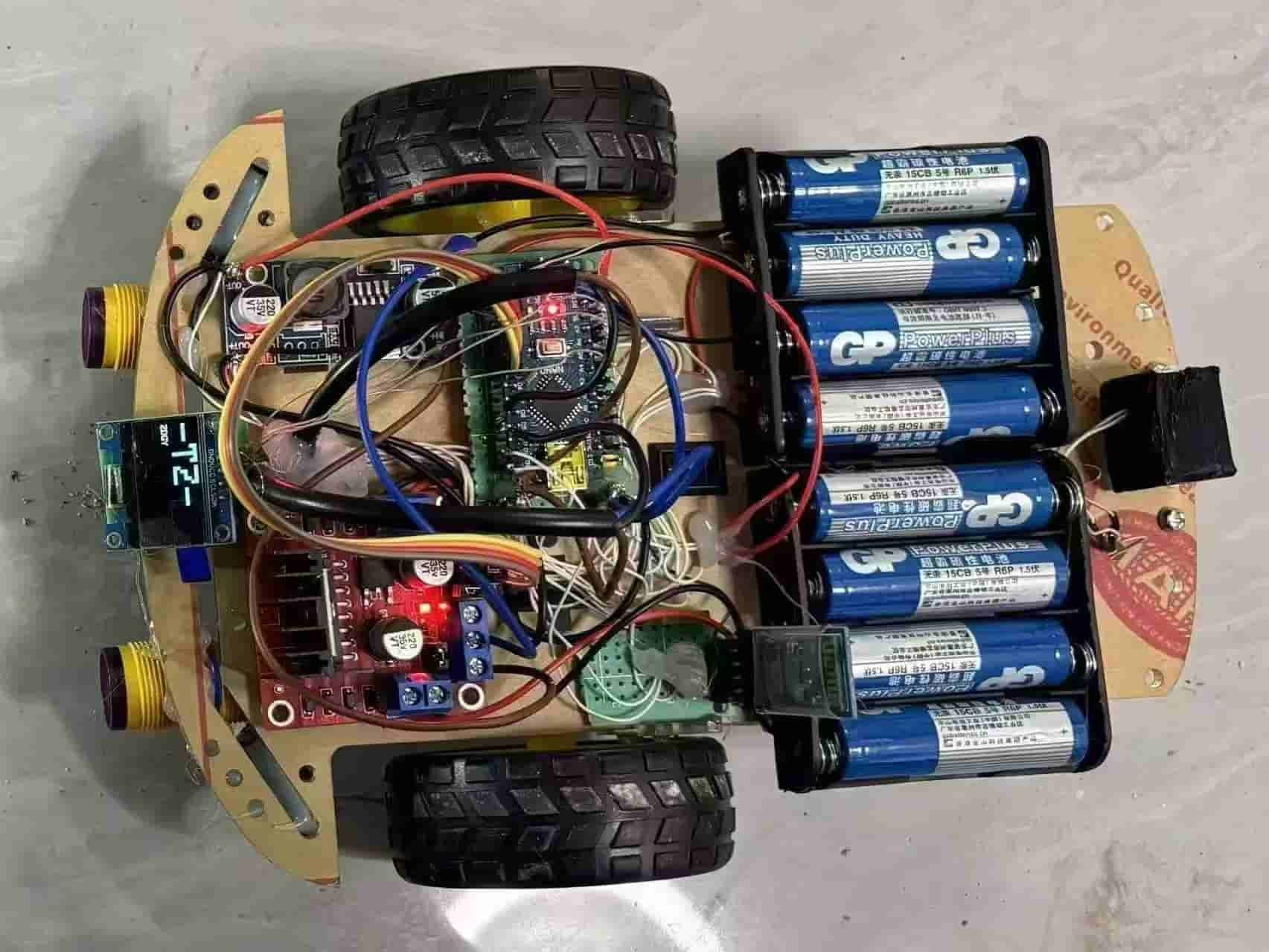
"智能避障,寻光检测系统"—基于单片机的自动避障寻光的智能小车
¥1699.00
累计销量 0
累计评价 0
包邮
一、目的、意义
1.随着科技的不断发展,智能机器人在各个领域的应用日益广泛。智能巡光小车作为一种典型的移动机器人,能够在特定环境下自主导航并完成相应任务,具有重要的研究价值和实际应用意义。
2.在工业生产中,可用于仓库货物巡检、设备运行监测等;在智能家居领域,能自动巡逻并监测室内环境参数、安全状况等;在科研教育方面,可作为机器人教学实践平台,帮助学生深入理解机器人技术原理与应用开发。
本课题旨在设计并实现一款智能巡光小车,通过对其硬件选型与搭建、软件设计以及系统集成与调试等多方面的研究,探索移动机器人在智能控制与自主导航领域的关键技术,为其进一步的推广应用奠定基础。
本项研究主要围绕着智能巡光小车的设计和达成来开展,主要工作包含:为系统做需求分析,确定小车的功能要求和性能指标;进行硬件选型,开展硬件挑选,明确光电传感器、感光传感器、蓝牙模块、电机驱动、电机及电源模块等硬件具体型号;构建核心控制电路、传感器电路、电机驱动电路还有电源电路,做好这个项目硬件系统的设计工作;设计软件系统,编写小车主要程序、寻光算法程序、蓝牙通讯程序以及电机控制程序;检验小车的寻光功能、运行性能以及数据传递的稳固性,给系统做调适与测验,保证系统达成预期设计目的。
| 买家 | 规格或版本 | 评分 | 评价 | 时间 |