| 现场环境 |
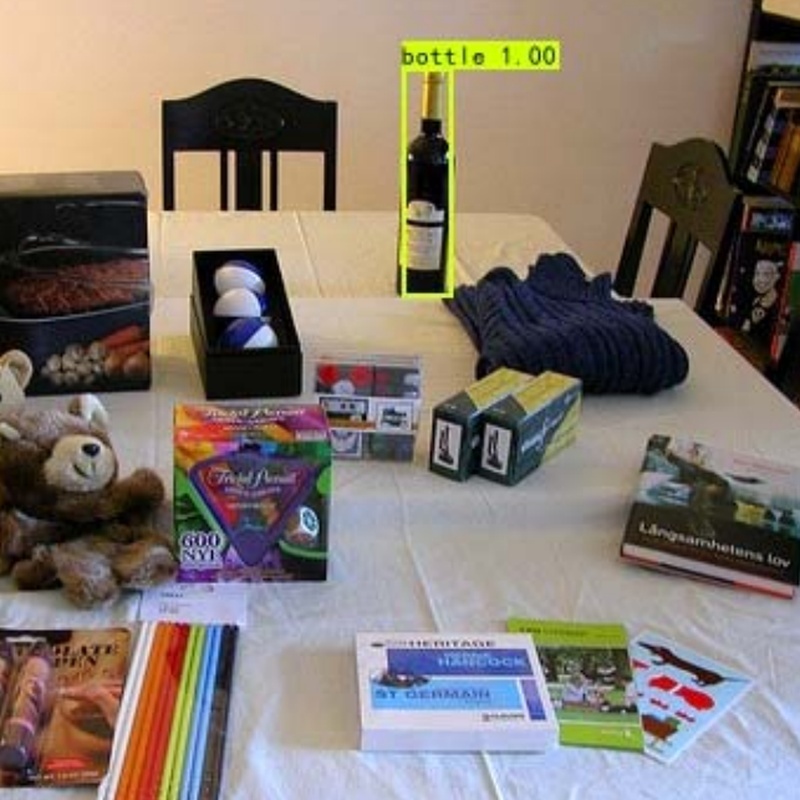
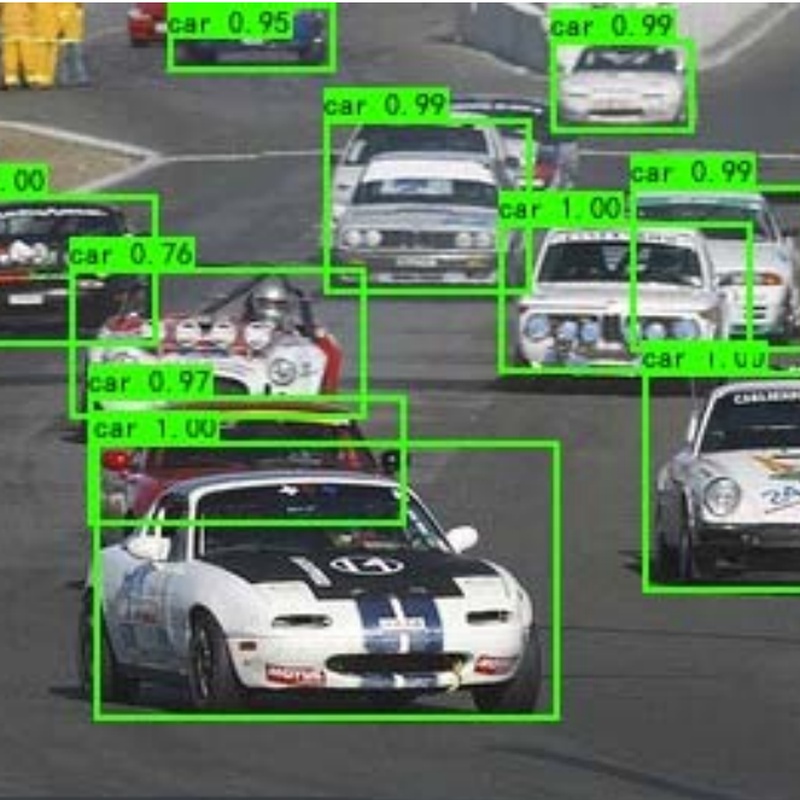
适用于多种场景的目标检测,城市道路、室内环境。 |
| 使用对象 |
各类目标物体,如车辆、行人、动物。 |
| 使用目的 |
通过多尺度目标检测,提高目标检测的精度和鲁棒性,适用于自动驾驶、安防监控领域 |
| 硬件配置 |
CPU:Intel Core i9-10980XE
内存:64GB
GPU:NVIDIA RTX 3090 |
| 硬件兼容 |
无
|
| 软件配置 |
操作系统:Ubuntu 20.04
编程语言:Python 3.7
依赖库:PyTorch 1.8, CUDA 11.4
编译器:Python自带编译器 |
| 软件兼容 |
无
|
| 输入数据 |
高清摄像头拍摄的图像帧 |
| 输出数据 |
目标物体的类别、位置坐标、置信度 |
| 样本获取 |
在PASCAL VOC和KITTI数据集上进行训练和测试,共获取约24000张标注图像 |
| 测试结果 |
在PASCAL VOC数据集上,mAP达到85.91%,FPS为34.4;在KITTI数据集上,mAP达到84.54% |
| 执行速度 |
检测速度为34.4帧/秒 |
| 资源消耗 |
使用18核CPU,计算占比平均约70%;64GB内存,使用占比60% |
| 源码类型 |
Python版本源码 |
| 文件大小 |
算法程序文件245K,权重文件245M |
| 相关备注 |
可提供技术支持和部署改进服务 |