| 现场环境 |
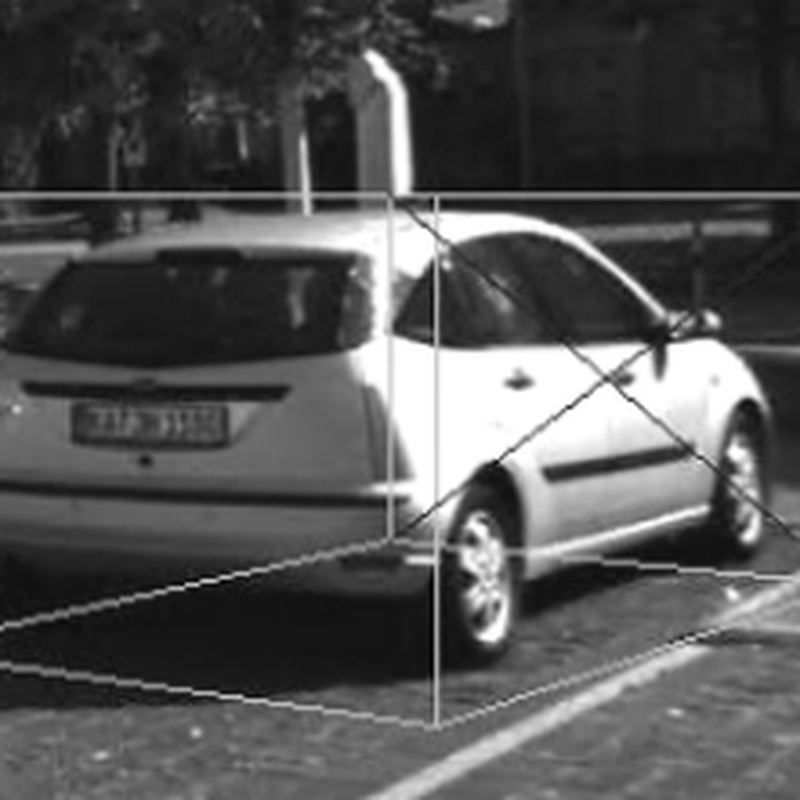
城市道路环境,车辆在路边停放或行驶。使用ZED双目摄像机获取图像,相机镜头距离车辆约5米,平行于车辆拍摄。环境光照条件良好,无极端天气影响。 |
| 使用对象 |
路边停放或行驶的车辆及其轮胎 |
| 使用目的 |
通过检测车辆的三维姿态,获取车辆与相机之间的距离、角度和三维边框信息,辅助自动驾驶系统进行路径规划和障碍物识别。 |
| 硬件配置 |
CPU:Intel Core i7-4700MQ
内存:8GB
GPU:Nvidia TITAN XP
摄像头:ZED双目摄像机
操作系统:Windows 10
编程语言:Python 3.6 |
| 硬件兼容 |
无
|
| 软件配置 |
操作系统:Windows 10
编程语言:Python 3.6
依赖库:TensorFlow 1.14, OpenCV 4.1.0, NumPy 1.16.4
编译器:PyCharm |
| 软件兼容 |
无
|
| 输入数据 |
双目摄像机拍摄的图像帧 |
| 输出数据 |
车辆的三维边框信息,包括车辆与相机的距离、角度和三维边框的坐标 |
| 样本获取 |
在实际道路环境中,以不同角度拍摄车辆,获取约600张标注了车辆和轮胎的图像,其中400张用于训练集,200张用于测试集。 |
| 测试结果 |
在测试集200个样本上,平均精度(AP)为90%,检测速度为6帧/秒。 |
| 执行速度 |
检测速度为6帧/秒 |
| 资源消耗 |
使用4核CPU,计算占比平均约60%;8GB内存,使用占比50%。 |
| 源码类型 |
Python版本源码 |
| 文件大小 |
算法程序文件23K,权重文件22M |
| 相关备注 |
可提供技术支持和部署改进服务。 |