| 现场环境 |
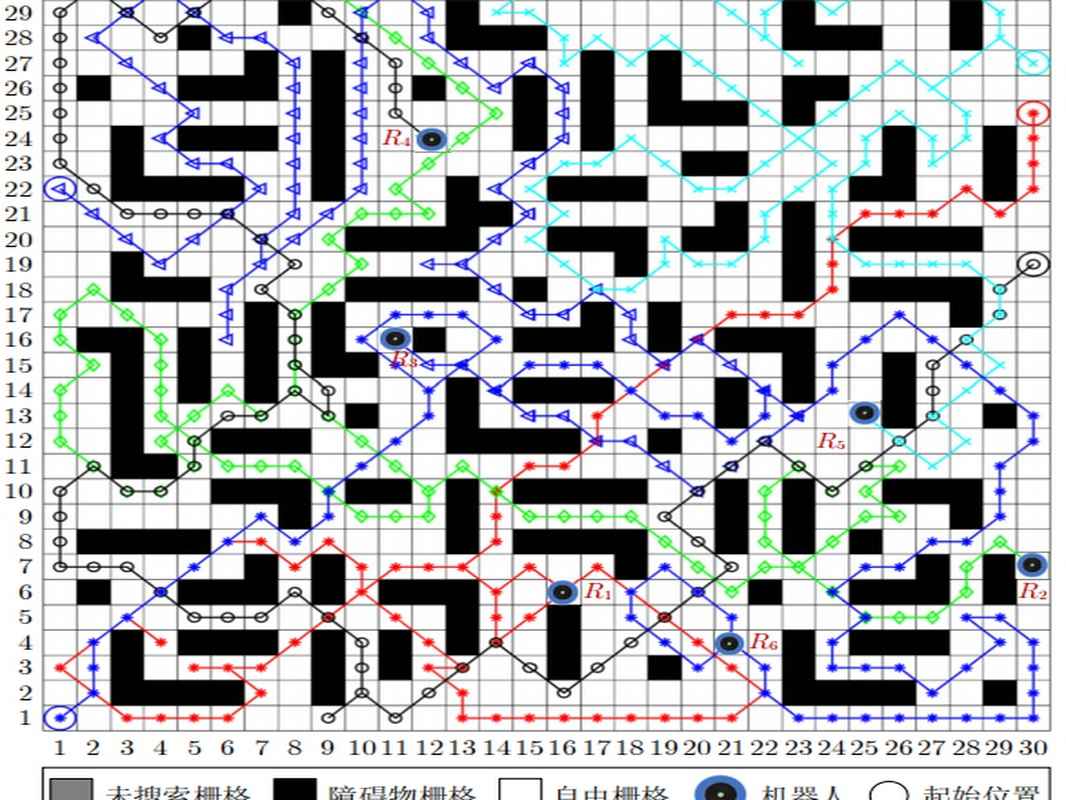
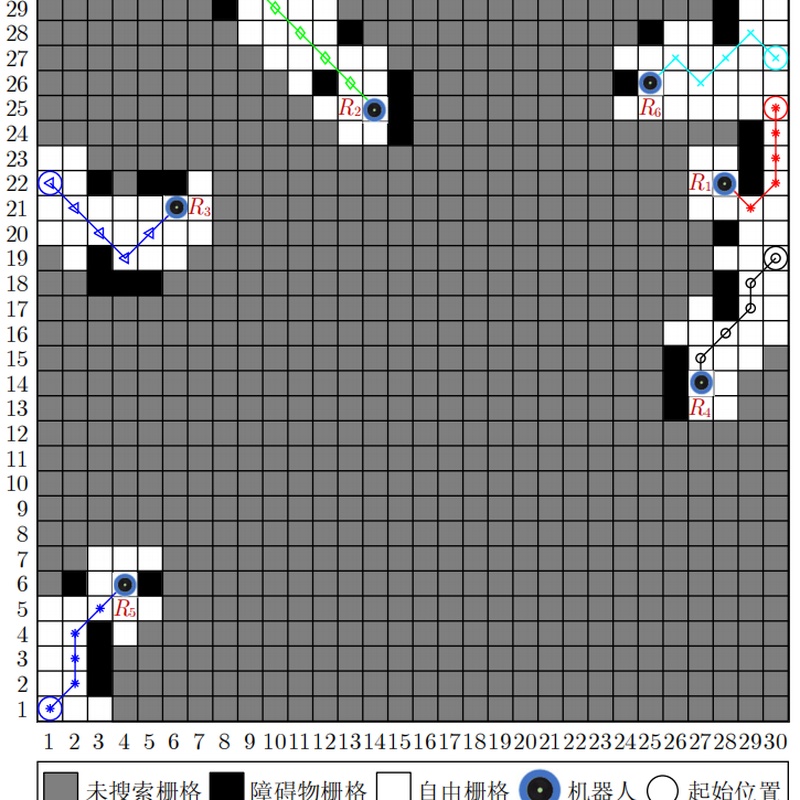
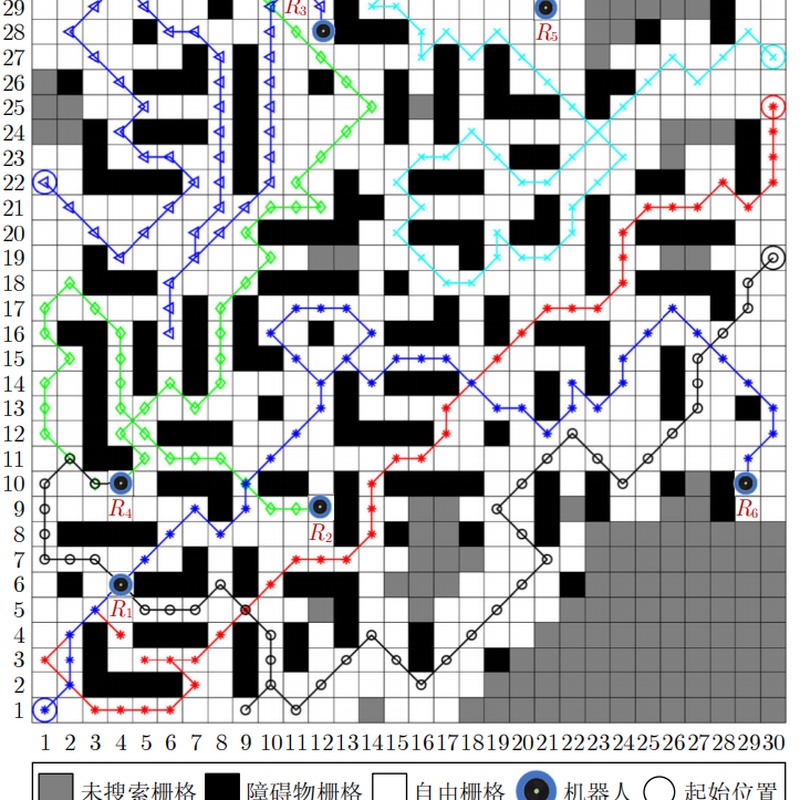
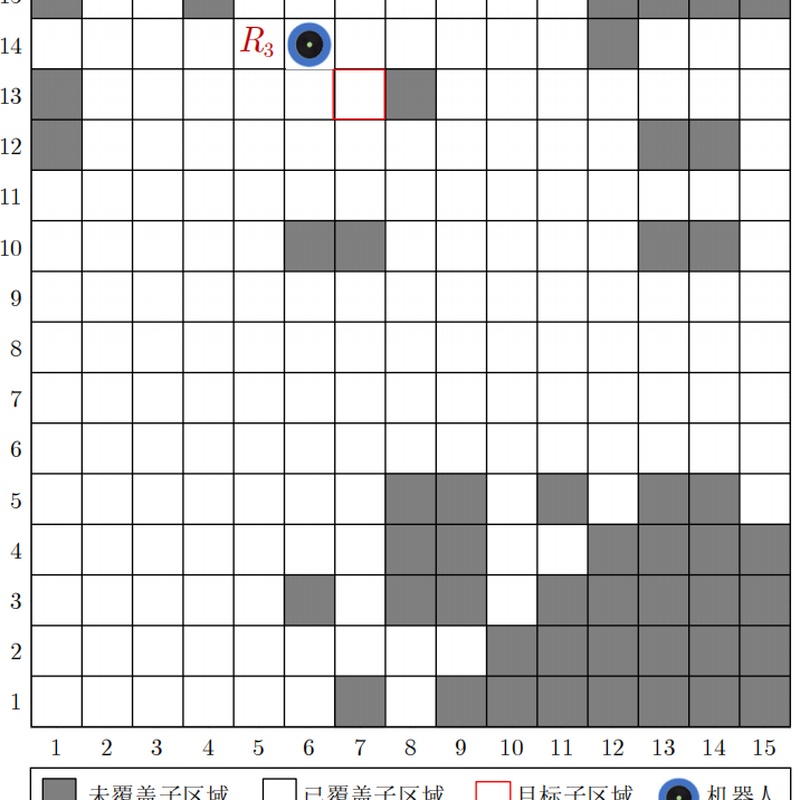
在复杂未知环境下,如战场、灾难现场等,机器人需要在没有先验环境信息的情况下进行区域搜索任务。任务区域为矩形,用栅格地图表示,区域内存在各种形状的障碍物。机器人通过传感器获取环境信息,实时更新分层仿生神经网络信息模型,并进行协同决策。 |
| 使用对象 |
多机器人系统(6个机器人)在复杂未知环境中的区域搜索任务,目标是高效地完成整个区域的搜索,找到所有未搜索区域。 |
| 使用目的 |
在复杂未知环境下,通过多机器人协同搜索,高效地完成区域搜索任务,减少搜索时间,提高搜索效率,避免机器人陷入局部最优状态。 |
| 硬件配置 |
CPU:Intel Core i7-9700K
GPU:NVIDIA GeForce RTX 2080 Ti
内存:16GB DDR4
摄像头:Intel RealSense D435
传感器:激光测距传感器、视觉传感器
通信接口:Wi-Fi 5 (IEEE 802.11ac) |
| 硬件兼容 |
无
|
| 软件配置 |
操作系统:Ubuntu 18.04 LTS
编程语言:Python 3.7
依赖库:NumPy、SciPy、Matplotlib、OpenCV
编译器:GCC 7.5.0 |
| 软件兼容 |
无
|
| 输入数据 |
区域搜索地图状态信息(栅格地图)、区域覆盖地图状态信息(覆盖地图)、机器人位置信息、传感器获取的环境信息。 |
| 输出数据 |
机器人搜索路径、区域覆盖率、平均决策时间、机器人位置状态。 |
| 样本获取 |
在仿真环境中随机生成不同形状和大小的障碍物,设置不同的机器人初始位置,进行多次仿真实验,获取84步的搜索轨迹和性能数据。 |
| 测试结果 |
对测试集进行仿真实验,区域覆盖率达到100%,平均决策时间为0.0214秒,与基线算法相比,搜索效率更高,机器人能够有效避免局部最优状态。 |
| 执行速度 |
单步决策时间约为0.0214秒,整个区域搜索任务在84步内完成。 |
| 资源消耗 |
4核CPU,计算占比分别平均约60%;16GB内存,使用占比约50%。 |
| 源码类型 |
本算法有Python版本源码,使用售卖方式三进行授权。 |
| 文件大小 |
算法程序文件30K |
| 相关备注 |
本算法针对复杂未知环境下的多机器人区域搜索问题,采用分层仿生神经网络信息模型和分布式模型预测控制框架,能够有效引导机器人高效完成区域搜索任务,避免陷入局部最优状态,具有较高的实用性和可靠性。 |