| 现场环境 |
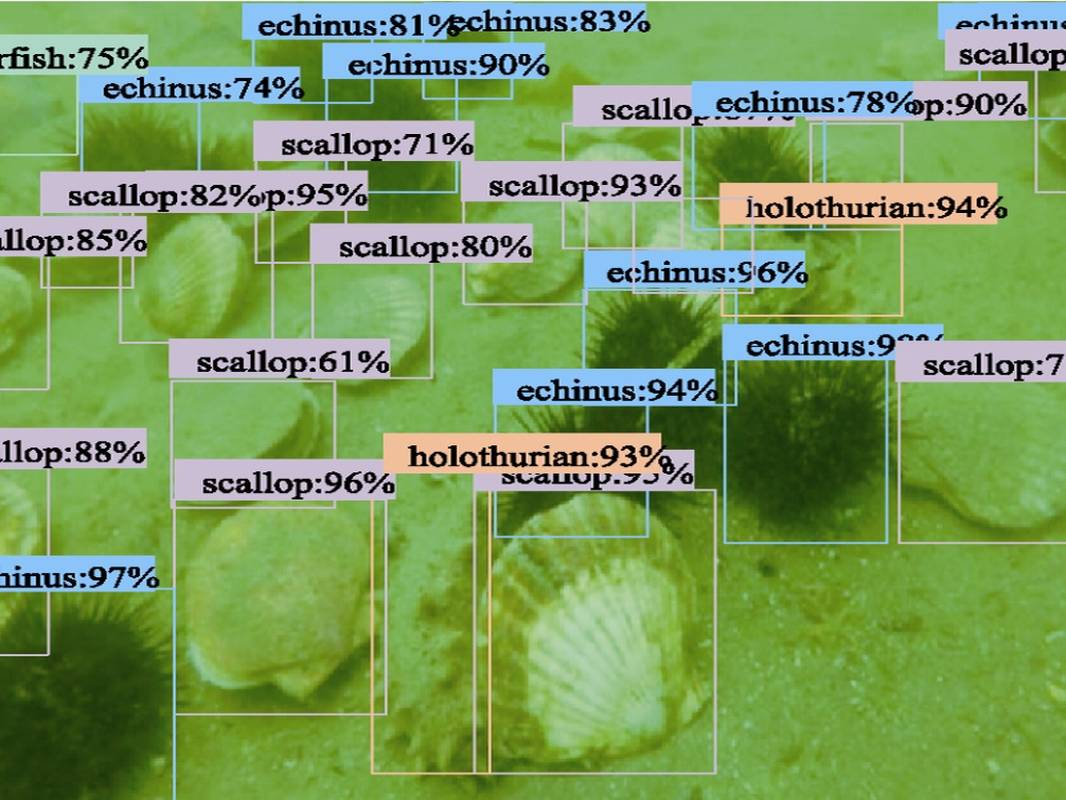
在水下环境中,使用摄像头采集图像,对图像进行处理以实现水下小目标的检测,例如在海洋资源勘探、智能化水产养殖和海底武器监视等领域。摄像头安装在水下机器人或潜水设备上,采集图像用于目标识别和定位。 |
| 使用对象 |
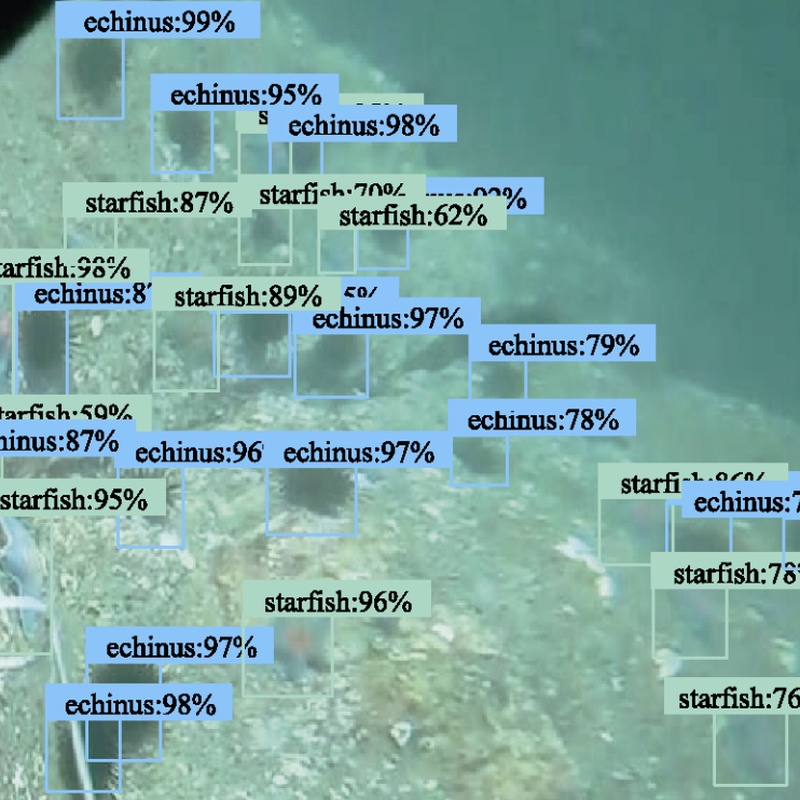
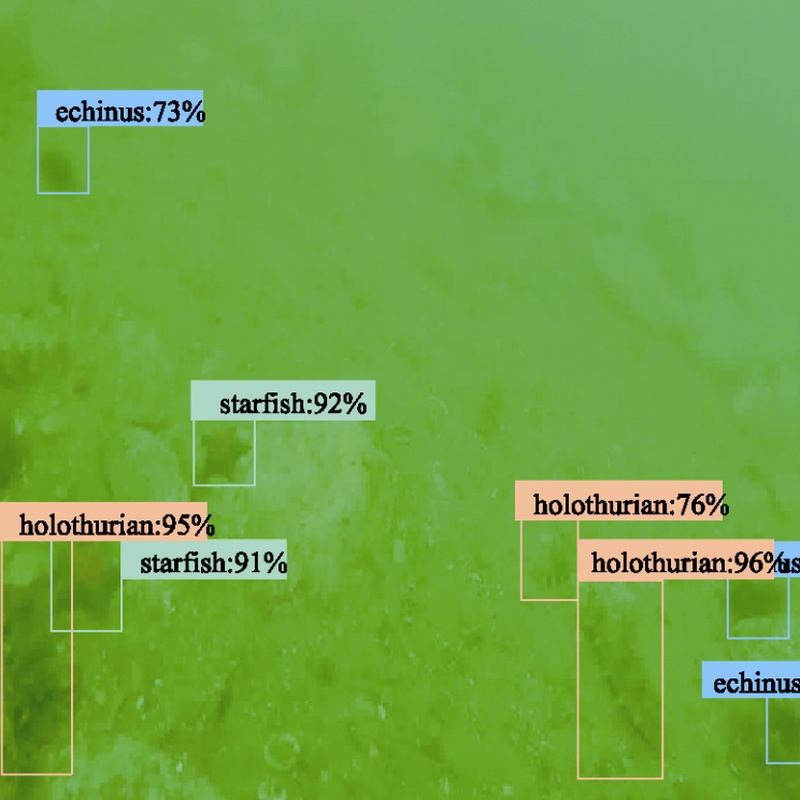
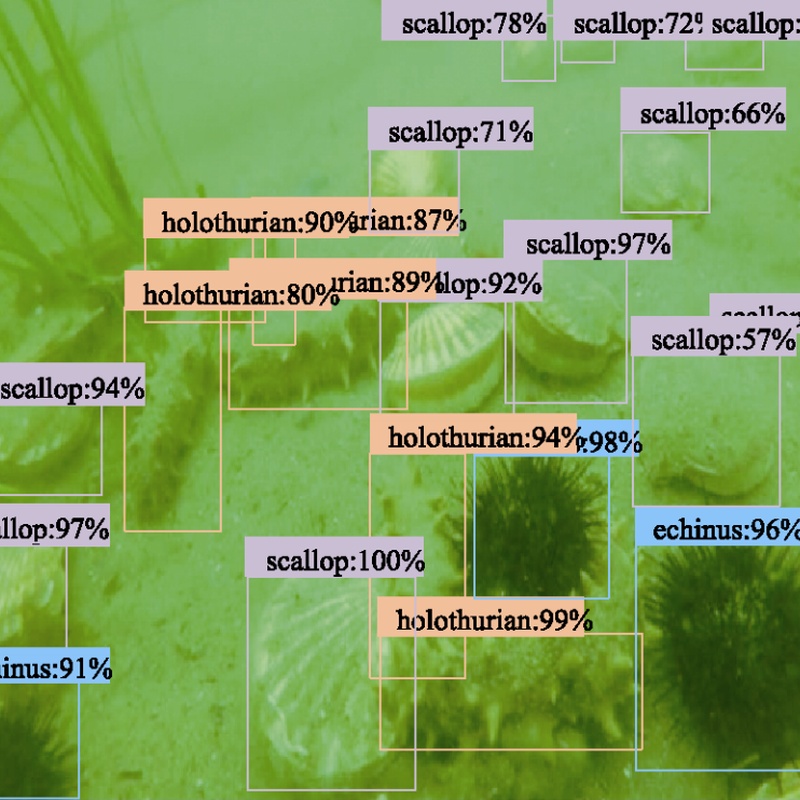
水下的小目标,海胆、海参、扇贝、海星等海鲜目标,以及可能存在的其他小型海洋生物或物体。 |
| 使用目的 |
通过精确检测水下小目标,提高海洋资源开发的效率和准确性,减少人工捕捞对海洋环境的破坏,同时为智能化水产养殖提供技术支持。 |
| 硬件配置 |
CPU:Intel Core i7-10750H,6核12线程,主频2.6GHz。
GPU:NVIDIA GTX 1080TI,8GB显存。
内存:16GB DDR4 3200MHz。
硬盘:512GB NVMe SSD。
摄像头:索尼Alpha 7 III,2420万像素,支持4K拍摄。
网卡:英特尔I219-V千兆以太网卡,1000Mbps传输速率。 |
| 硬件兼容 |
无
|
| 软件配置 |
操作系统:Windows 10专业版64位。
依赖库:Python 3.8,TensorFlow 2.4.0,OpenCV 4.5.1,NumPy 1.19.5,SciPy 1.5.4。
编译器:Visual Studio 2019。 |
| 软件兼容 |
无
|
| 输入数据 |
可见光波段图像帧,图像分辨率为640×640像素,RGB三通道。 |
| 输出数据 |
目标检测结果,包括目标类别、位置坐标(x, y)、宽度和高度。 |
| 样本获取 |
在实际使用现场以不同角度录制视频帧,获取3589帧样本图像,其中2589帧用于训练集,1000帧用于测试集。 |
| 测试结果 |
对测试集1000个样本进行测试,平均准确率(mAP)达到77.89%,比基线Faster R-CNN算法提高了2.82%。 |
| 执行速度 |
检测速度12.5帧/秒。 |
| 资源消耗 |
CPU:4核,计算占比平均约60%。 GPU:显存占用约5GB,计算占比平均约80%。 内存:使用占比约50%。 |
| 源码类型 |
本算法有Python版本源码,使用售卖方式三进行授权。 |
| 文件大小 |
算法程序文件40K,权重文件200M。 |
| 相关备注 |
本算法通过改进特征金字塔网络(FPN)和损失函数,显著提高了水下小目标检测的精度和效率。通过协同非局部注意力模块(CNAM)和三叉戟特征增强模块(TFEM),增强了算法对多尺度特征的提取能力,减少了细粒度信息的损失,提高了前景和背景的区分度。此外,引入线性回归损失增益系数,进一步提高了小目标的定位精度。 |