| 现场环境 |
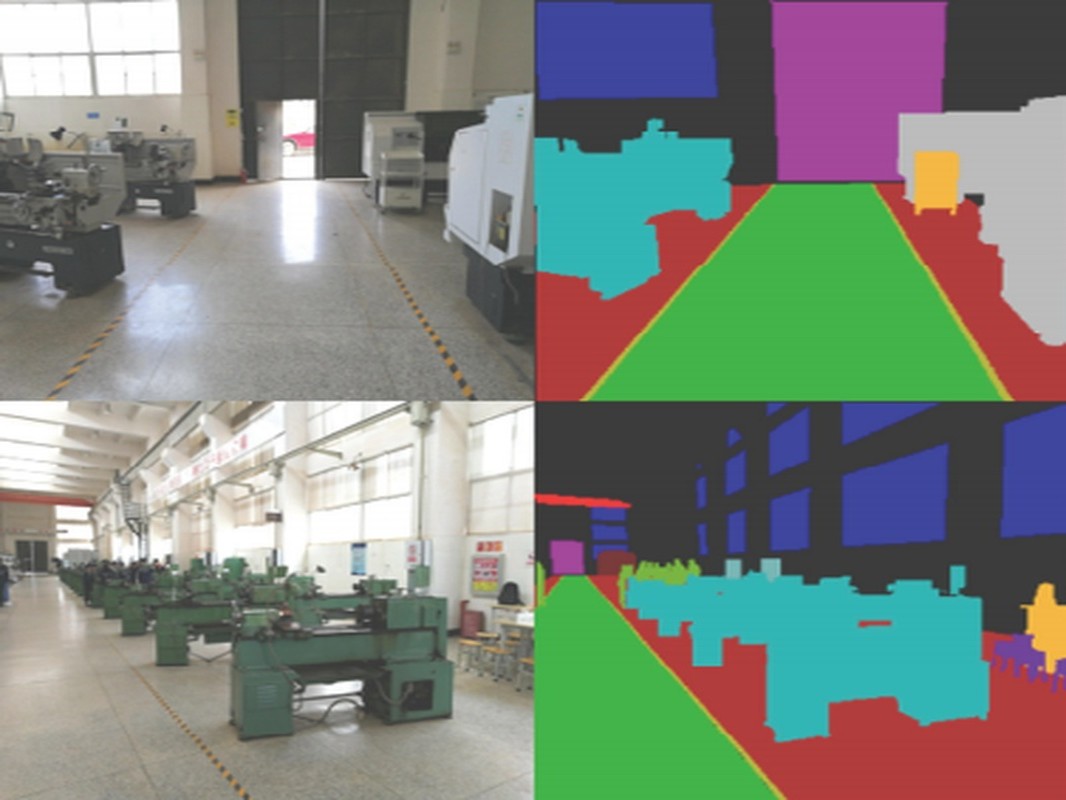
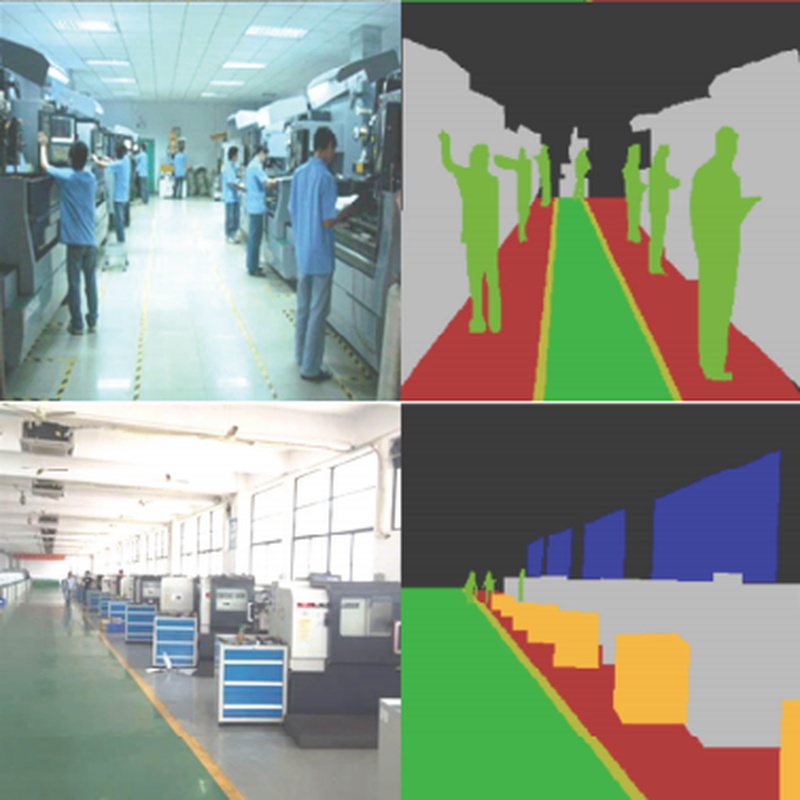
在机加工车间环境中,用于自主导航小车(AGV)的导航系统。车间内有多种设备和人员,目标类别较多且密集,环境复杂。AGV需要准确识别可通行区域和不可通行区域,以实现自主导航和避障。 |
| 使用对象 |
机加工车间内的不可通行区域、可通行区域、道路线、窗户、门、普通机床、数控机床、加工中心、桥式起重机、人、桌子、椅子、电脑、货柜、零件或零件箱 |
| 使用目的 |
通过语义分割技术,为AGV提供精确的环境理解,使其能够自主导航并避开障碍物,提高生产效率和安全性。 |
| 硬件配置 |
CPU:Intel Core i5-8400,主频2.80GHz。
GPU:NVIDIA GTX 1060 Ti,6GB显存。
内存:8GB DDR4。
摄像头:普通RGB摄像头,分辨率321×321。
传感器:无特定传感器。
接口:USB 3.0接口连接摄像头。
硬盘:512GB SSD。
显卡:NVIDIA GTX 1060 Ti。
网卡:Intel Wi-Fi 6 AX201。 |
| 硬件兼容 |
无
|
| 软件配置 |
操作系统:Windows 10 64位,版本1909。
依赖库:Python 3.8,TensorFlow 1.8.0,NumPy 1.19.5,OpenCV 4.5.1。
编译器:Microsoft Visual Studio 2019。 |
| 软件兼容 |
无
|
| 输入数据 |
可见光波段图像帧,图像分辨率321×321像素,RGB三通道。 |
| 输出数据 |
语义分割结果,包括不同目标类别的像素级分类标签。 |
| 样本获取 |
在昆明理工大学机械加工车间场景环境获取235幅实拍图像,通过网上下载365幅机加工车间场景图像作为数据集扩充,共形成600幅图像。统一将图像尺寸修改为321×321,通过人工标注对应图像的真实值(ground truth, GT)获得图像数据集。数据集划分为训练集500幅,验证集80幅和测试集20幅 |
| 测试结果 |
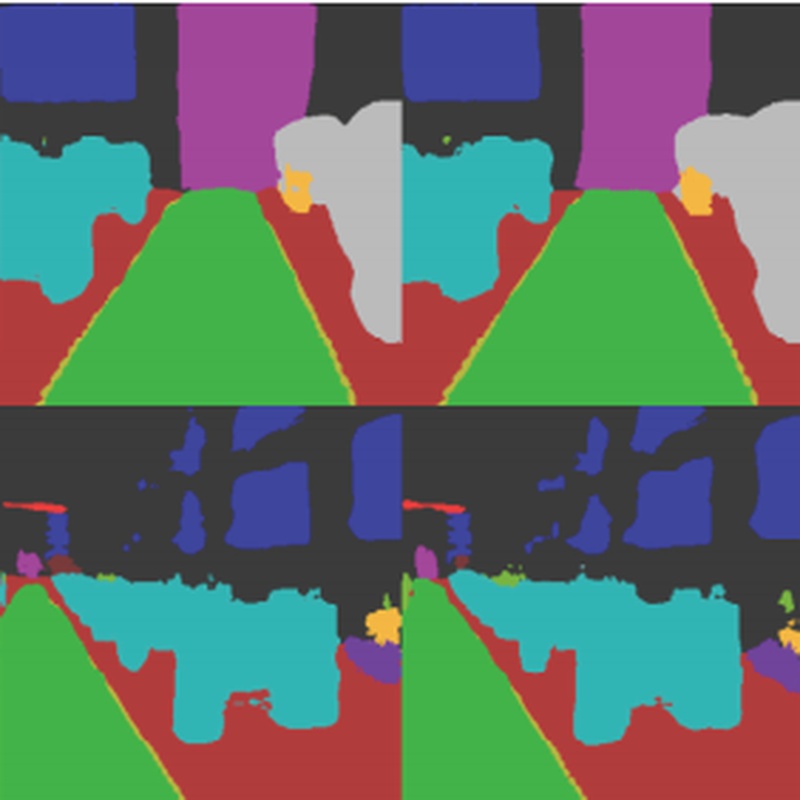
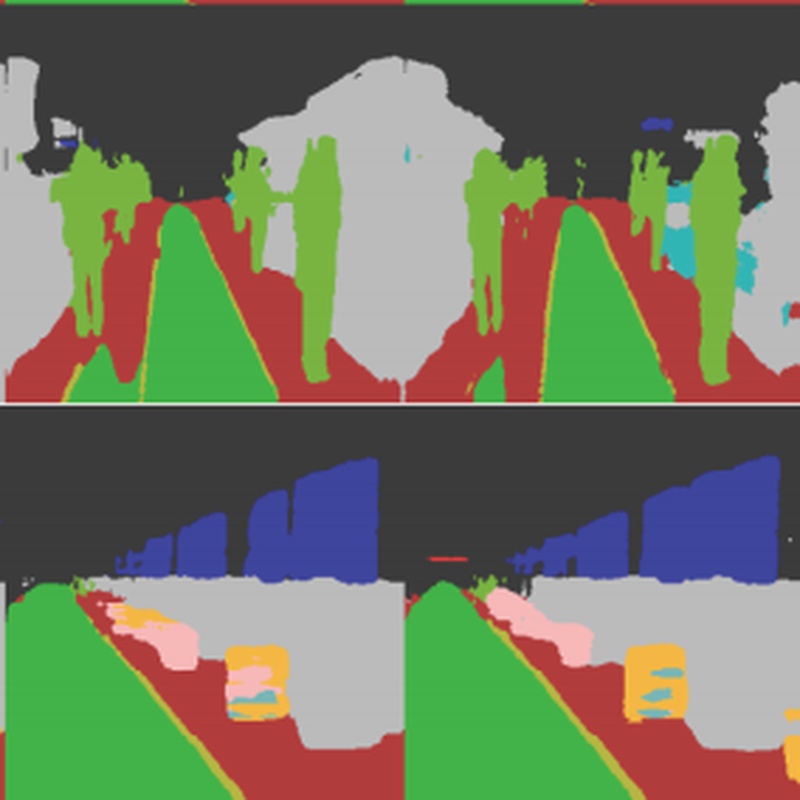
对测试集20个样本进行测试,平均交并比(mIoU)达到56.04%,验证精度提升5.14%。 |
| 执行速度 |
单次分割速度约150ms/次。 |
| 资源消耗 |
CPU:4核,计算占比平均约60%。 GPU:显存占用约4GB,计算占比平均约70%。 内存:使用占比约40%。 |
| 源码类型 |
本算法有Python版本源码,使用售卖方式三进行授权。 |
| 文件大小 |
算法程序文件40K,权重文件350M。 |
| 相关备注 |
本算法基于DeepLabv3模型架构,通过扩展分支结构、设置不同比例的空洞卷积扩张率、改善棋盘效应,并添加多尺度特征融合的解码器单元,显著提升了机加工车间场景语义分割的精度和效率。 |