| 现场环境 |
在行星表面光照条件不稳定、噪声干扰大、地面场景单一的环境中,如模拟行星表面场景,相机距离地面一定高度进行拍摄,周围有不同光照强度的光源照射,场景中有障碍物。 |
| 使用对象 |
行星表面的障碍物、地形 |
| 使用目的 |
获取行星表面障碍物的深度信息,实现无人探测车对障碍物的精确识别和测量,辅助无人探测车安全行走 |
| 硬件配置 |
Intel i7-11800H CPU,32GB RAM,可移植到FPGA或专用图形处理器(GPU)以进一步提升系统响应速度 |
| 硬件兼容 |
无
|
| 软件配置 |
操作系统为Windows 10,使用C++语言在Visual Studio 2022开发环境上实现。 |
| 软件兼容 |
无
|
| 输入数据 |
双目相机拍摄的左右图像对 |
| 输出数据 |
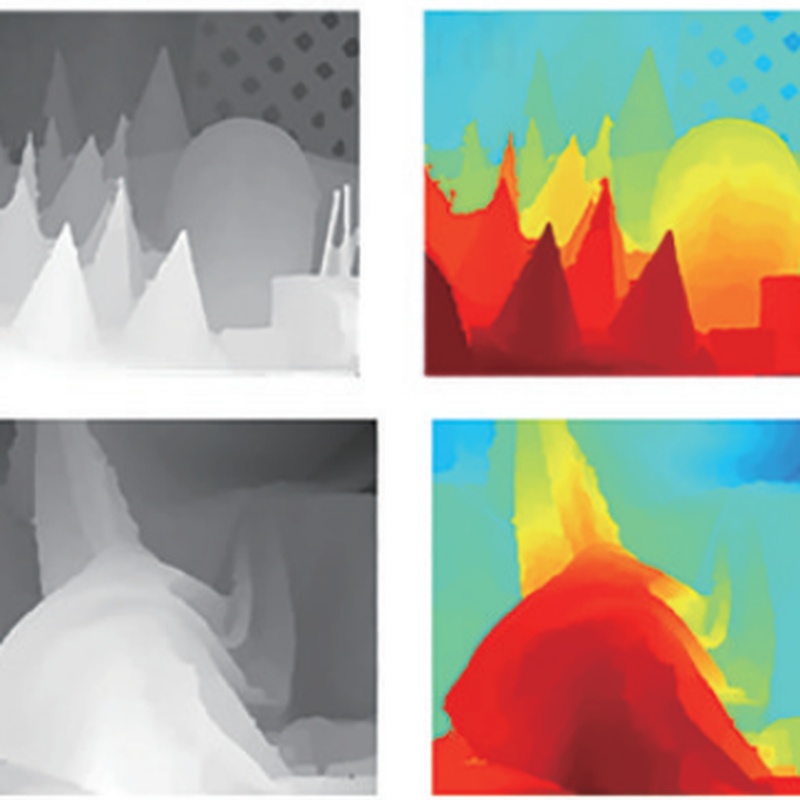
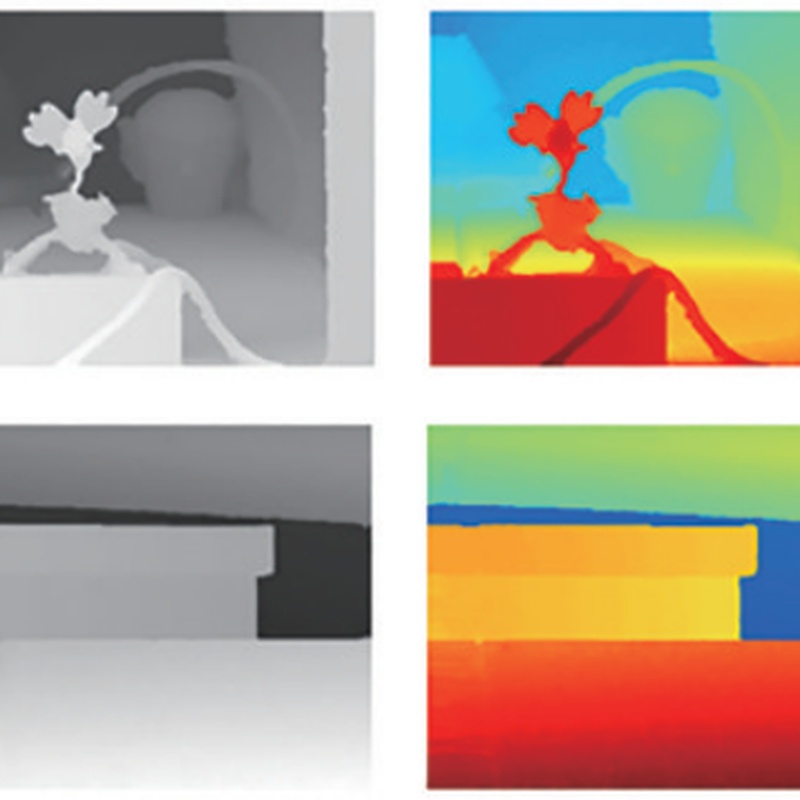
视差图、深度图、障碍物检测结果 |
| 样本获取 |
在模拟行星表面场景下,从不同角度拍摄获取图像样本,用于算法测试和验证 |
| 测试结果 |
在Middlebury测试图像集上平均误匹配率为8.7%,在模拟行星表面场景下误匹配率为9.6% |
| 执行速度 |
在Intel i7-11800H CPU平台上,推理速度达到20.3 FPS。 |
| 资源消耗 |
CPU:平均占用率约70% GPU:平均占用率约80% 内存:平均占用率约60% |
| 源码类型 |
C++版本源码 |
| 文件大小 |
算法程序文件24KB,权重文件12MB。 |
| 相关备注 |
无 |