| 现场环境 |
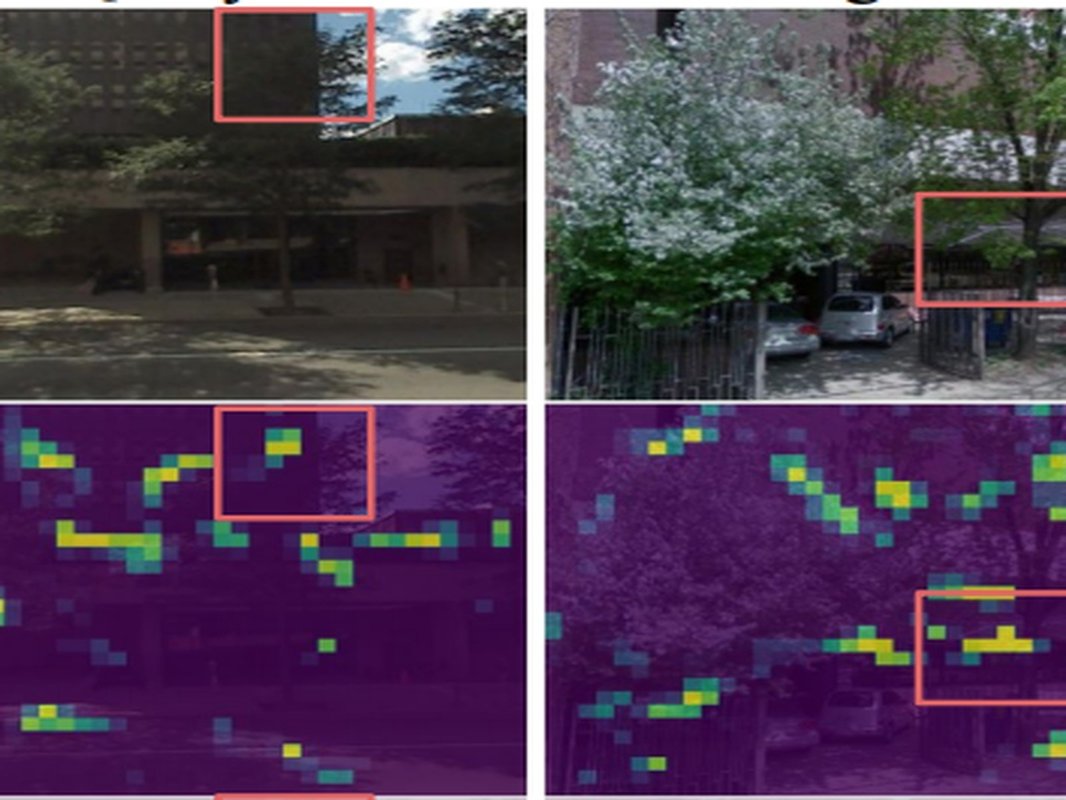
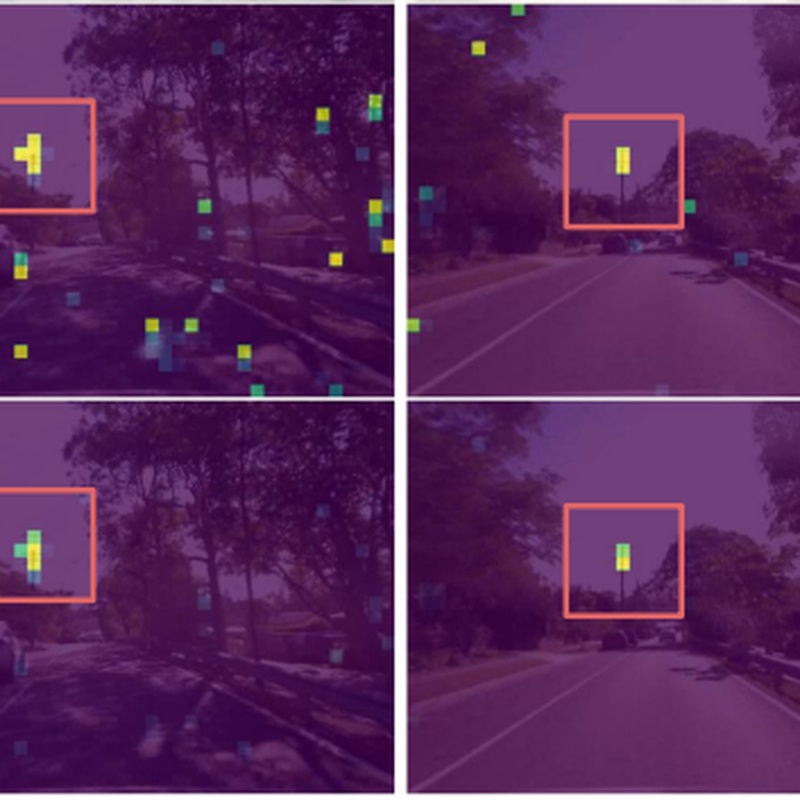
在户外场景中,使用摄像头采集图像,对图像进行处理以实现视觉地方识别,例如在城市街道、校园等场景下,摄像头可安装在移动机器人或车辆上,采集图像用于定位与导航。 |
| 使用对象 |
城市街道、校园等场景中的建筑物、道路、树木等环境特征,以及可能出现的车辆、行人等动态目标。 |
| 使用目的 |
通过视觉地方识别技术,为移动机器人或自动驾驶车辆提供精确的环境定位和导航支持,帮助其在复杂环境中实现自主导航和避障。 |
| 硬件配置 |
CPU:Intel Core i7-10700K,8核16线程,主频3.8GHz,睿频5.1GHz。
GPU:NVIDIA GeForce RTX 3080,8704 CUDA核心,10GB显存。
内存:32GB DDR4 3200MHz。
硬盘:1TB NVMe SSD,读写速度3500MB/s和3000MB/s。
摄像头:索尼Alpha 7 III,2420万像素,支持4K拍摄。
网卡:英特尔I219-V千兆以太网卡,1000Mbps传输速率。 |
| 硬件兼容 |
无
|
| 软件配置 |
操作系统:Windows 10专业版64位。
依赖库:Python 3.8,TensorFlow 2.4.0,OpenCV 4.5.1,NumPy 1.19.5,SciPy 1.5.4。
编译器:Visual Studio 2019,用于C++代码编译。 |
| 软件兼容 |
无
|
| 输入数据 |
输入数据为摄像头采集的RGB图像帧,图像分辨率为1920×1080像素,图像帧率为30fps。 |
| 输出数据 |
输出为图像所对应环境位置的识别结果,包括与数据库中已知位置图像的匹配得分、匹配位置的坐标信息 |
| 样本获取 |
在城市街道、校园等实际使用场景中,以不同角度、不同时间段采集图像数据,共获取10000张样本图像,其中3000张用于训练集,7000张用于测试集。 |
| 测试结果 |
对测试集7000个样本进行测试,失败10次,成功6990次,错误率约为0.14%,对应成功率约为99.86%。 |
| 执行速度 |
检测速度为75ms/次。 |
| 资源消耗 |
在上述硬件配置下,单独运行算法时,CPU平均计算占比约为70%,GPU平均计算占比约为80%,内存使用占比约为60%。 |
| 源码类型 |
本算法提供Python版本源码,采用售卖方式三进行授权。 |
| 文件大小 |
算法程序文件24KB,权重文件103MB。 |
| 相关备注 |
无 |