| 现场环境 |
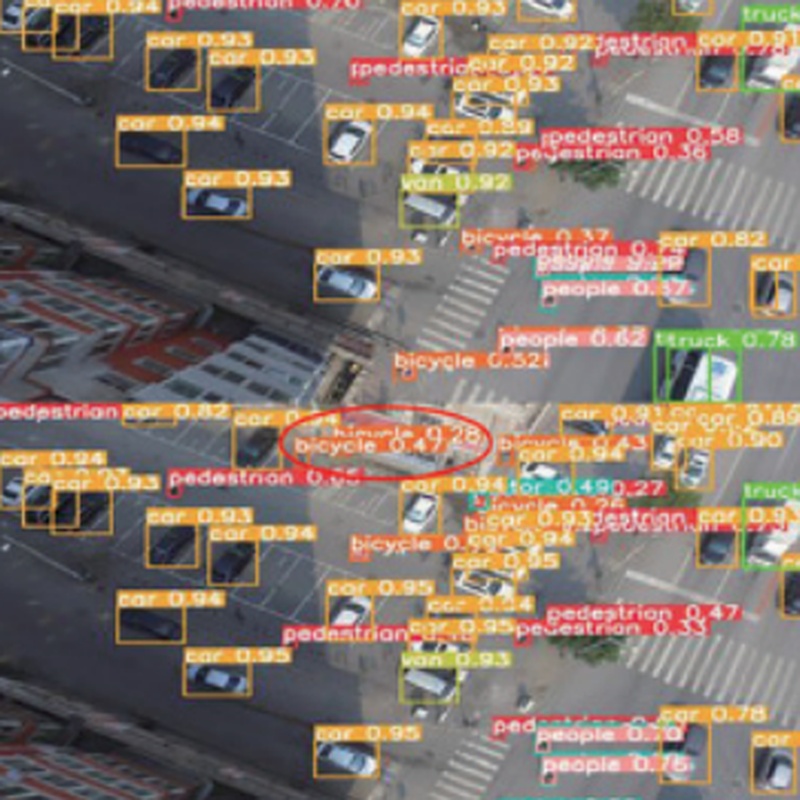
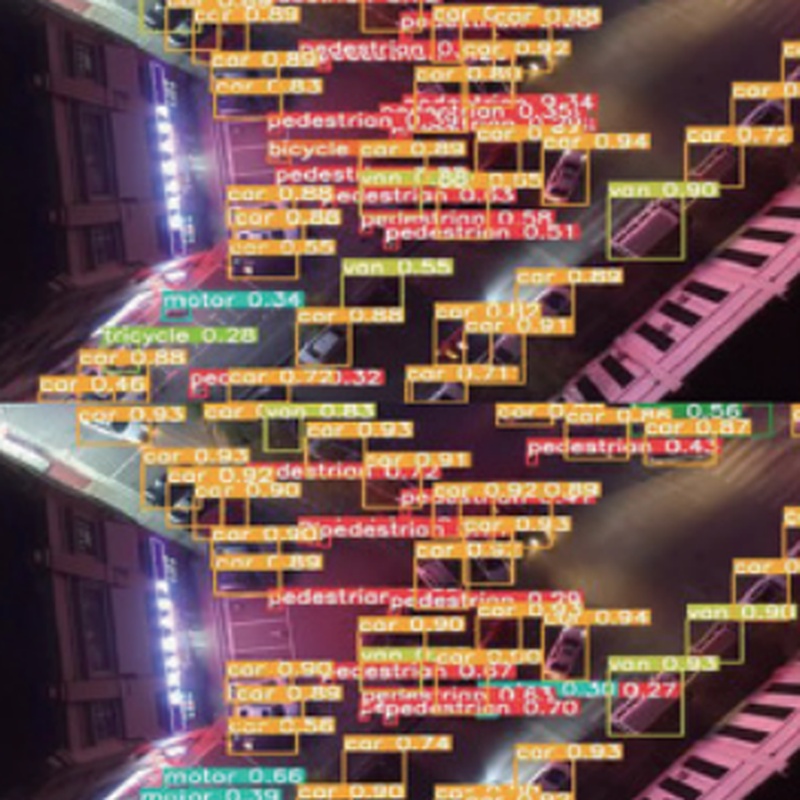
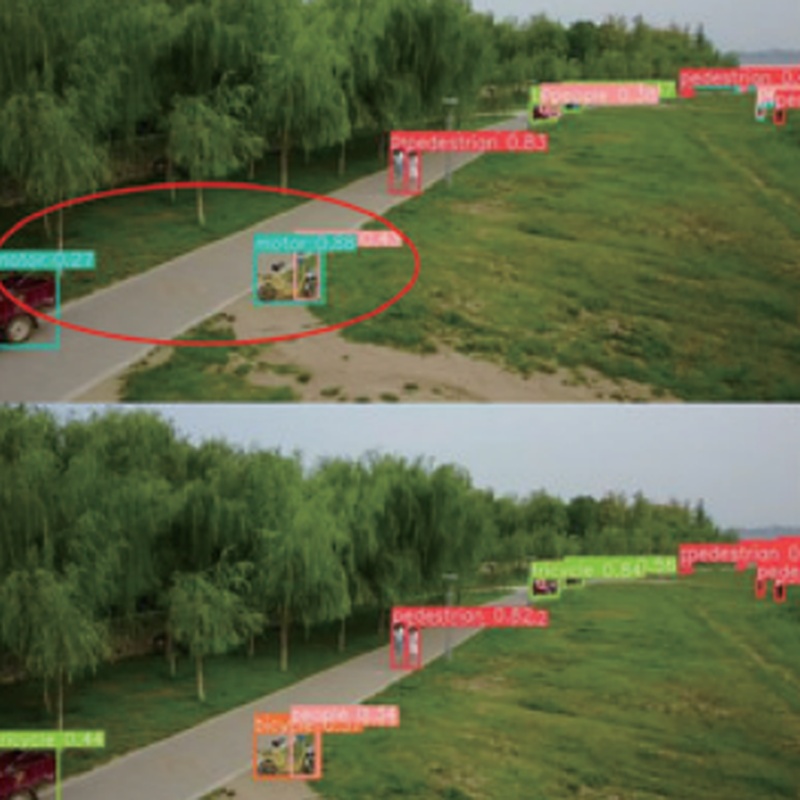
无人驾驶飞行器(UAV)航拍图像小目标检测,适用于复杂背景、目标微小且密集的场景。 |
| 使用对象 |
UAV航拍图像中的小目标,如行人、车辆、自行车 |
| 使用目的 |
提高UAV航拍图像中小目标的检测精度,降低漏检率,同时实现模型轻量化,便于在移动端部署。 |
| 硬件配置 |
CPU:13th Gen Intel(R) Core(TM) i7-13700K,16核24线程,主频3.4GHz。
GPU:GeForce RTX 4090,24GB显存。
内存:32GB。
操作系统:Windows 11。
CUDA版本:11.6。
PyTorch版本:2.2.0。 |
| 硬件兼容 |
无
|
| 软件配置 |
操作系统:Windows 11。
深度学习框架:PyTorch 2.2.0。
CUDA版本:11.6。 |
| 软件兼容 |
无
|
| 输入数据 |
UAV航拍图像,包含小目标的可见光波段图像帧。 |
| 输出数据 |
检测到的小目标的类别、位置坐标、置信度 |
| 样本获取 |
使用VisDrone2019和Tinyperson数据集,分别包含8629张和1610张图像,按7:2:1的比例划分为训练集、测试集、验证集。 |
| 测试结果 |
VisDrone2019数据集:
精确度(P):64.1%
召回率(R):48.7%
mAP50:50.0%
mAP50:95:30.4%
参数量(Param):12.3M
计算量(GFLOPs):37.8 |
| 执行速度 |
检测速度约为9.6ms/次 |
| 资源消耗 |
CPU:在4核CPU上,计算占比分别平均约50%、60%、70%、40% GPU:显存占用约6GB,显卡计算占比约80% 内存:使用占比约60% |
| 源码类型 |
本算法有Python版本源码,可提供授权使用。 |
| 文件大小 |
算法程序文件约30K,权重文件约220M。 |
| 相关备注 |
无 |