| 现场环境 |
在工业焊接车间内,环境光照稳定,无强烈反光或阴影干扰。相机与焊缝表面保持适当距离和角度进行拍摄,相机镜头距离焊缝表面约50cm,平行于焊缝表面拍摄。 |
| 使用对象 |
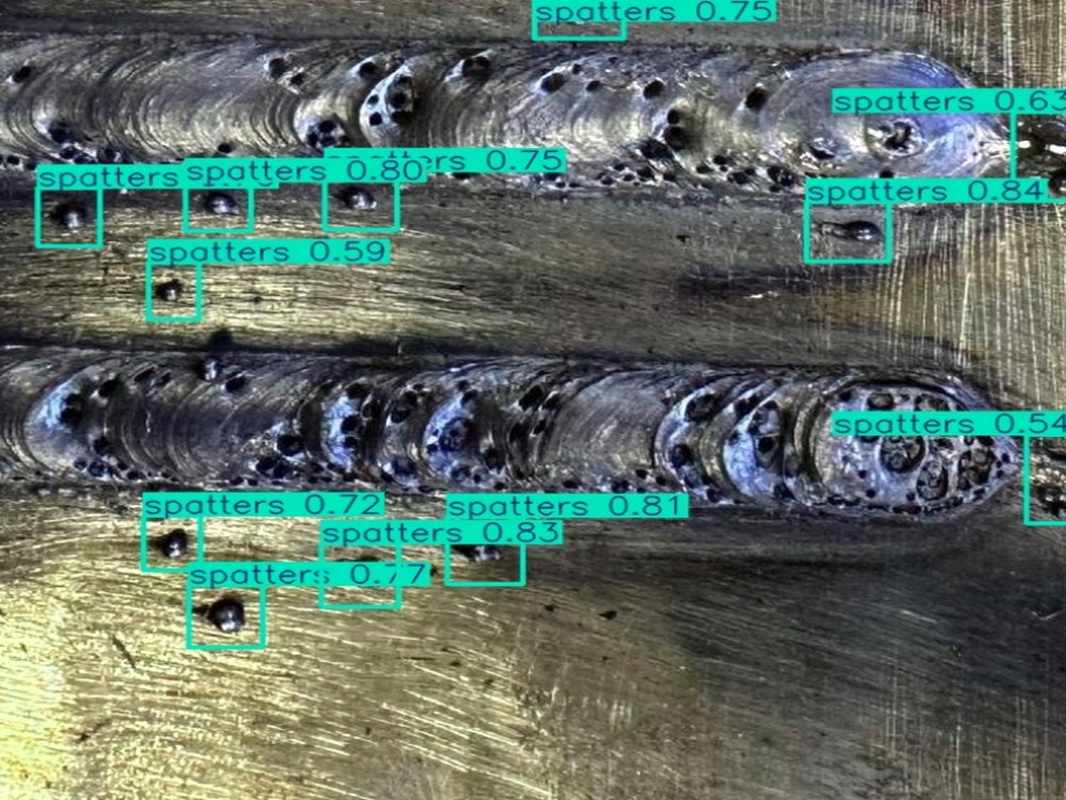
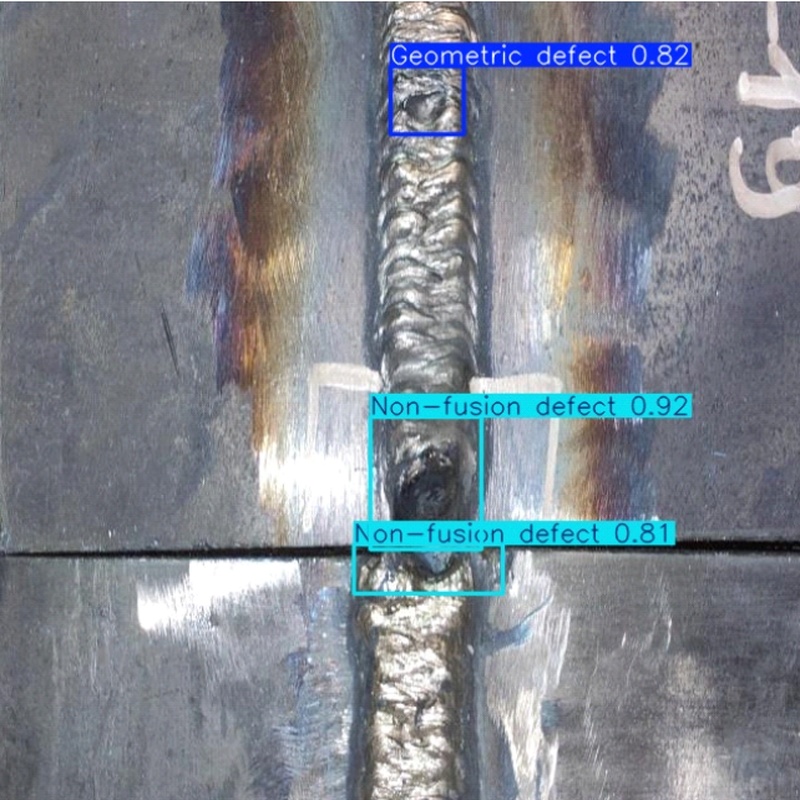
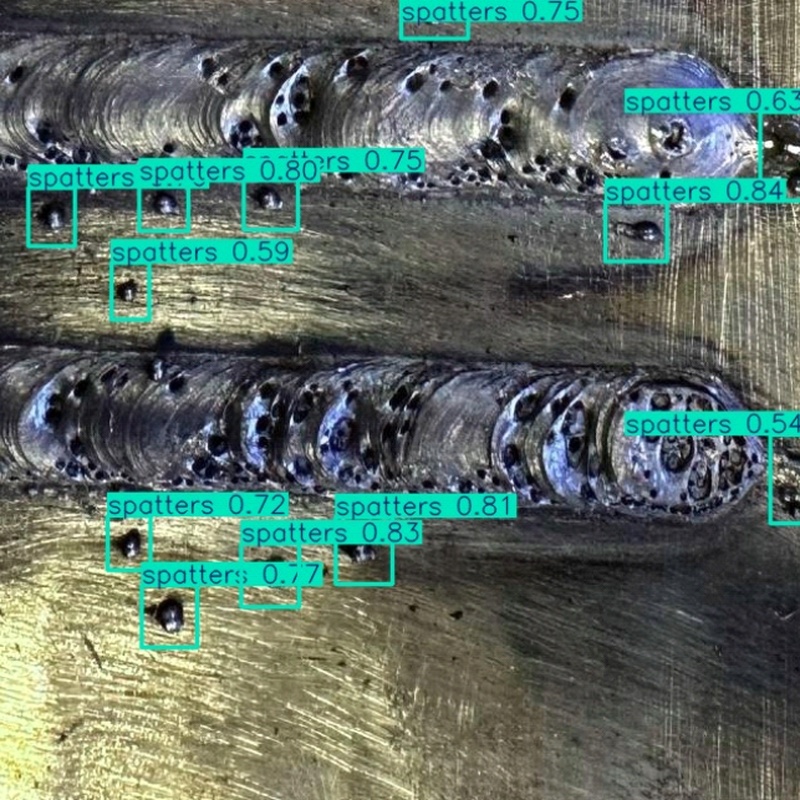
焊缝表面的各类缺陷,几何缺陷、非融合缺陷、孔隙、飞溅。 |
| 使用目的 |
准确检测焊缝表面的各类缺陷,以便及时发现并处理,提高焊接质量,保障工业生产的稳定运行。 |
| 硬件配置 |
CPU:Intel (R) Core (TM) i5-13400处理器
GPU:Nvidia RTX 4060ti(8G)显卡
内存:16GB
摄像头:工业级高分辨率相机,分辨率不低于2048×2048像素,用于拍摄焊缝表面的图像
硬盘:1TB SSD,用于存储大量的图像数据和模型文件,读写速度快
网卡:千兆以太网卡,用于数据传输和远程监控 |
| 硬件兼容 |
无
|
| 软件配置 |
操作系统:Windows 11
编程语言:Python 3.9.19
深度学习框架:PyTorch 1.10
图形加速:CUDA 11.3 |
| 软件兼容 |
无
|
| 输入数据 |
焊缝表面的图像帧,图像分辨率为640×640像素,以jpg格式存储。 |
| 输出数据 |
缺陷类型(几何缺陷、非融合缺陷等)、缺陷位置坐标(以图像像素坐标表示)、缺陷数量。 |
| 样本获取 |
使用Roboflow网站开源的钢板焊缝缺陷检测数据集Welding Defect Test-V2和东北大学开源的带钢表面缺陷数据集NEU-DET。Welding Defect Test-V2数据集共有4类缺陷,共计3866张,按7:2:1的比例划分为训练集(2706张)、验证集(773张)、测试集( |
| 测试结果 |
对测试集进行检测,平均精度(mAP0.5)达到95.3%,精确度为90.7%,召回率为89.4%,检测速度(FPS)达到257帧。 |
| 执行速度 |
3.9ms/次 |
| 资源消耗 |
CPU:在4核CPU上,计算占比分别平均约50%、60%、70%、40% GPU:显存占用约6GB,显卡计算占比约80% 内存:使用占比约60% |
| 源码类型 |
本算法有Python版本源码,可提供授权使用。 |
| 文件大小 |
算法程序文件25K,权重文件67M。 |
| 相关备注 |
无 |