| 现场环境 |
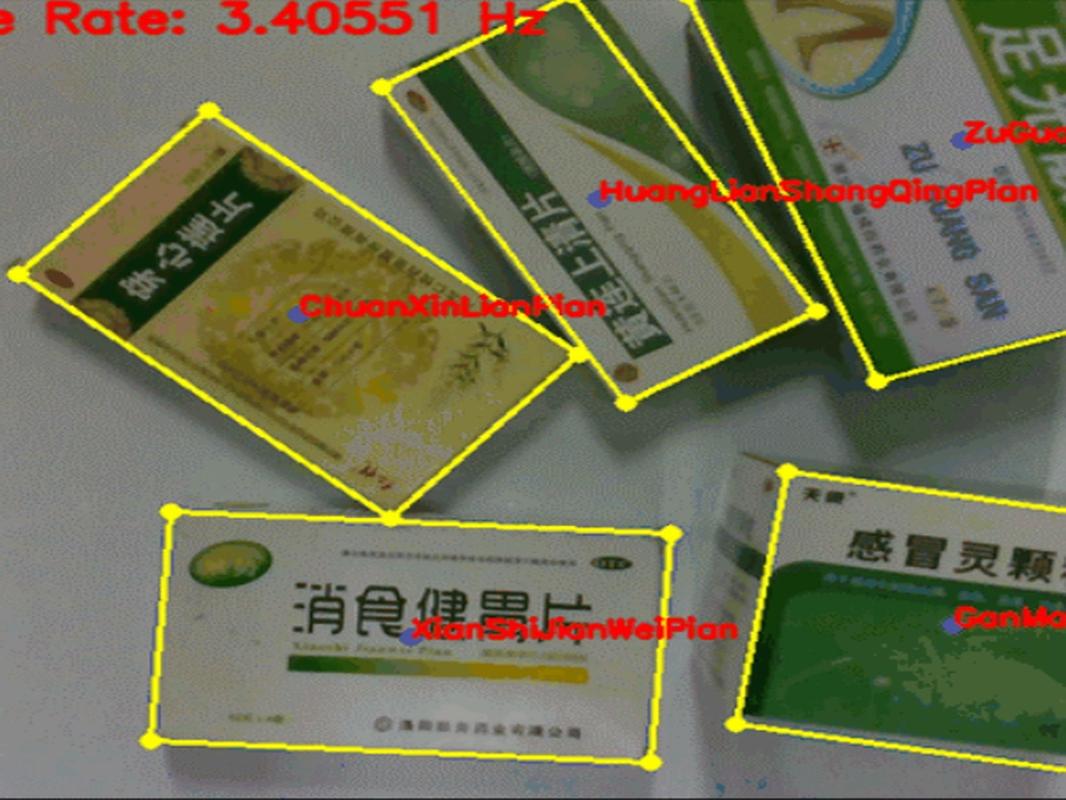
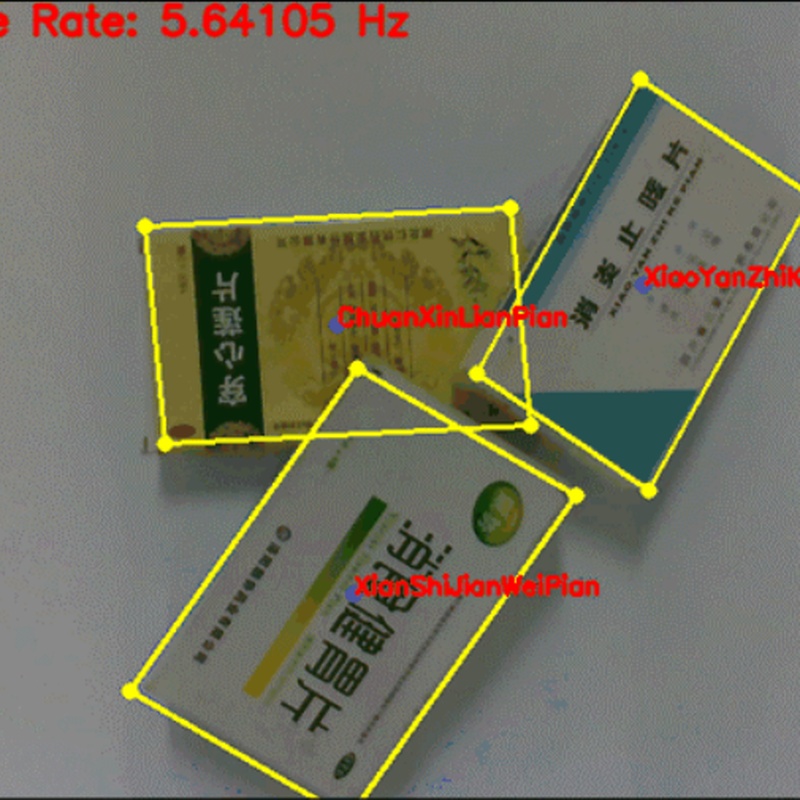
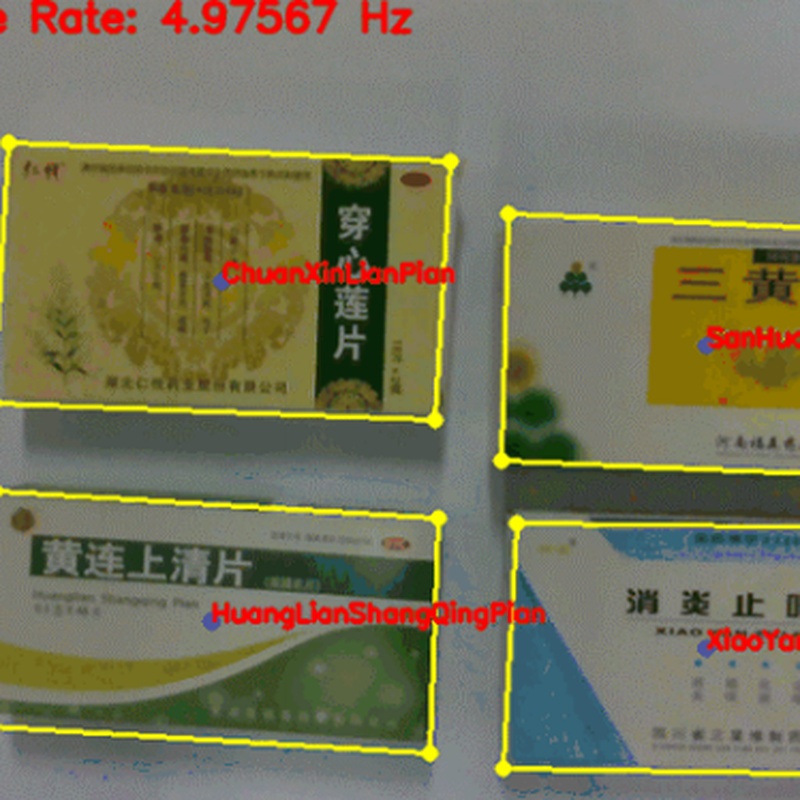
在药品自动拣选环境中,使用Intel RealSense D435相机作为视觉传感器,相机安装于机械臂末端,距离药盒约50cm,平行于药盒拍摄,环境光照均匀。 |
| 使用对象 |
药盒(感冒灵颗粒、消炎止咳片、足光散等常见药盒)。 |
| 使用目的 |
在药品自动拣选过程中,快速、准确地估计药盒的位姿,为机械臂提供药盒的位置和姿态信息,实现自动化分拣。 |
| 硬件配置 |
CPU:Intel Core i5-7th
内存:4GB
摄像头:Intel RealSense D435 |
| 硬件兼容 |
无
|
| 软件配置 |
操作系统:Centos
编程语言:Python 3.5.3
深度学习框架:无(传统计算机视觉算法)
编译器:g++ 5.4.0 |
| 软件兼容 |
无
|
| 输入数据 |
RGB图像和有组织点云数据。 |
| 输出数据 |
药盒的位置坐标、姿态信息(法向量)。 |
| 样本获取 |
在实验环境中采集600幅存在视点变化、旋转变换和尺度变化的药盒图像,用于测试。 |
| 测试结果 |
药盒位姿估计速度可达11帧/s,定位偏差小于5mm,姿态估计偏差在2°以内,检测成功率约为93.5%,mIOU分数可达95.1%。 |
| 执行速度 |
单个药盒位姿估计速度811帧/s,多个药盒位姿估计速度26帧/s。 |
| 资源消耗 |
4核CPU,计算占比平均约60%;4GB内存,使用占比约50%。 |
| 源码类型 |
本算法有Python版本源码,使用售卖方式三进行授权。 |
| 文件大小 |
算法程序文件30KB,权重文件56MB。 |
| 相关备注 |
本算法针对药品自动拣选过程中的药盒位姿估计问题,采用二次关键点匹配和最小二乘法进行姿态重建,具有较高的检测速度和精度,能够满足实际分拣需求。 |