| 现场环境 |
自然环境:无人机在户外环境中飞行,可能会遇到多个动态障碍物,如其他飞行器、鸟类、移动的车辆等。
- 传感器环境:无人机配备有视觉传感器(LiDAR),用于获取障碍物信息,传感器的探测范围有限,例如20米。 |
| 使用对象 |
动态障碍物:无人机需要识别和避让的障碍物。 |
| 使用目的 |
安全飞行:通过实时检测和预测障碍物的运动,规划避障路径,确保无人机在复杂环境中的安全飞行。 - 最小化航迹偏差:在避让障碍物的同时,尽量减少对原定飞行路径的偏离 |
| 硬件配置 |
CPU:多核处理器,用于处理算法中的计算任务。
- GPU:可选,用于加速算法中的实时计算,尤其是在处理大量传感器数据时。
- 传感器:视觉传感器(LiDAR),用于获取障碍物的位置、速度和加速度信息。
- 内存:至少16GB RAM,用于存储传感器数据和算法中间结果。
- 摄像头:用于获取环境的视觉信息,辅助障碍物检测。 |
| 硬件兼容 |
无
|
| 软件配置 |
Linux或Windows。
依赖库:PyTorch(深度学习方法),OpenCV用于图像处理,NumPy用于数学计算。
-编译器:GCC或Clang,用于编译C++代码。 |
| 软件兼容 |
操作系统:算法可以在多种操作系统上运行,但可能需要对代码进行适当的调整和优化。 - 依赖库:可以使用其他深度学习框架,如Keras或MXNet,具体取决于算法实现。
|
| 输入数据 |
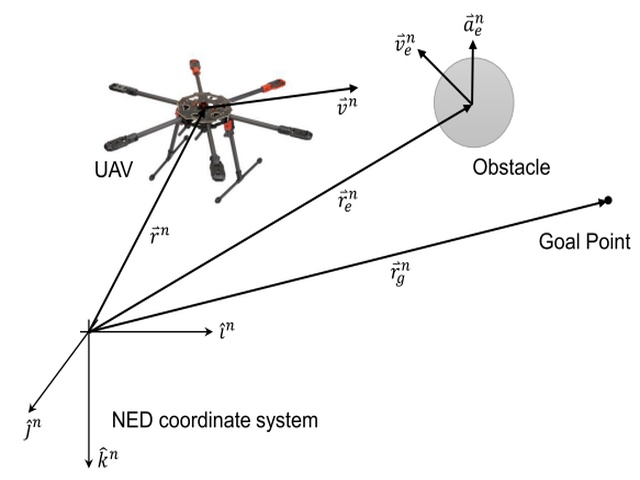
传感器数据:来自视觉传感器的点云数据,用于确定障碍物的位置、速度和加速度。 - 无人机状态:无人机的当前位置、速度和加速度。 |
| 输出数据 |
避障路径:无人机为避免碰撞而需要遵循的新路径。 - 目标点:无人机在避障过程中需要飞向的下一个目标点。 |
| 样本获取 |
模拟数据:通过数值模拟生成障碍物的运动轨迹和无人机的飞行路径,用于算法的测试和验证。 - 实际飞行数据:在实际飞行中收集的传感器数据,用于算法的进一步优化和验证。 |
| 测试结果 |
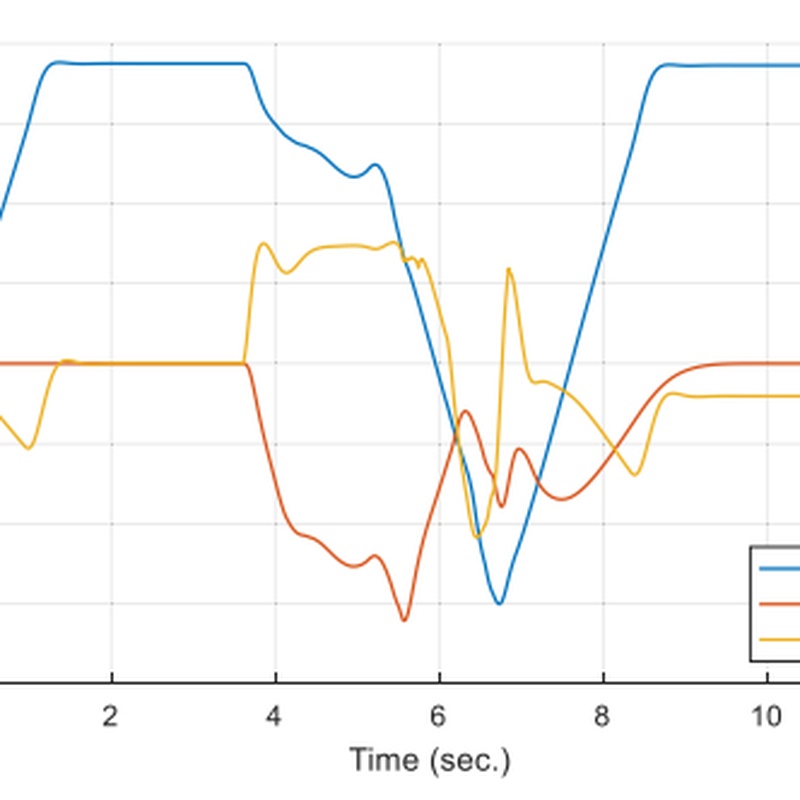
单障碍物测试:在单个动态障碍物的环境中,无人机成功避让,最小安全距离为2.08米。
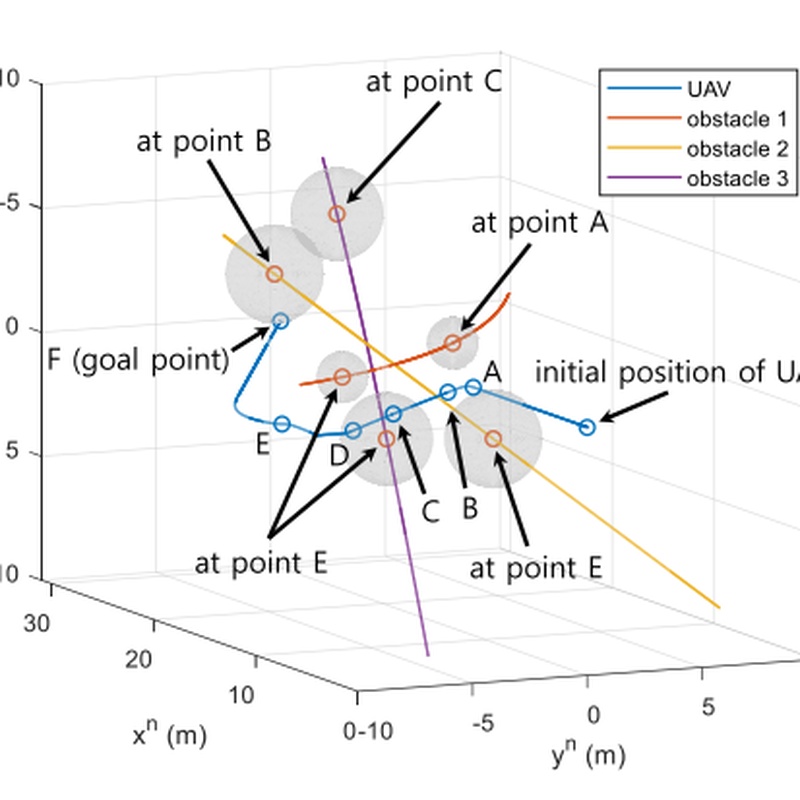
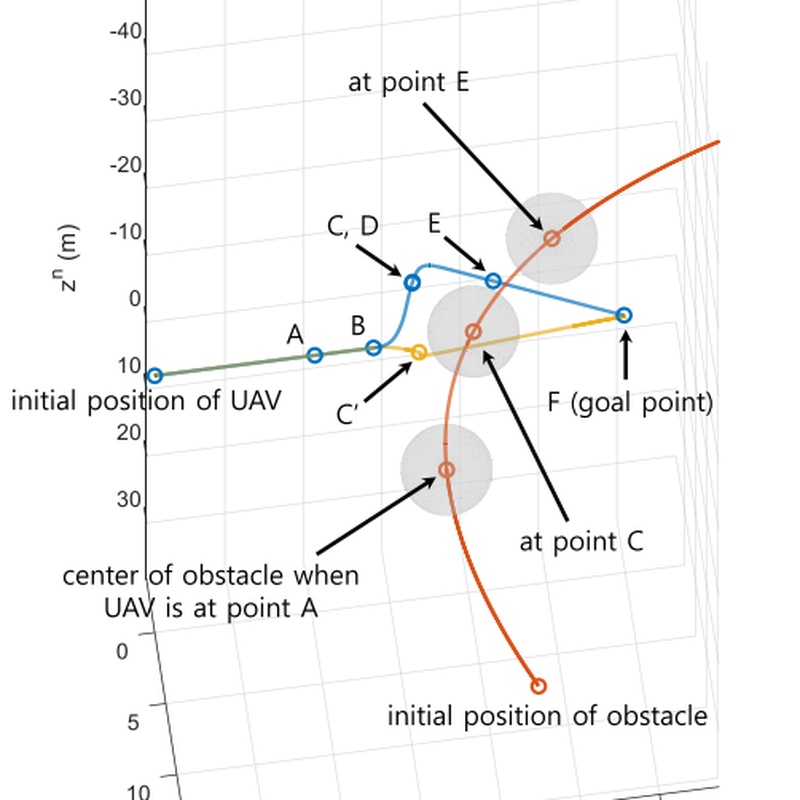
- 多障碍物测试:在多个动态障碍物的环境中,无人机能够成功避让所有障碍物,最小安全距离分别为2.12米、2.47米和2.48米。 |
| 执行速度 |
避障决策速度:算法能够在0.05秒内完成避障决策,满足实时性要求。 |
| 资源消耗 |
CPU占用率:在避障过程中,CPU占用率约为60%。 - 内存占用:算法运行时内存占用约为50%。 |
| 源码类型 |
- C++版本:算法的主要实现语言为C++,适合嵌入式系统和实时应用。 - Python版本:提供Python版本的源码,便于算法的快速开发和测试。 |
| 文件大小 |
算法程序文件:约45KB。 |
| 相关备注 |
算法特点
- 实时性:算法能够在短时间内完成避障决策,适合实时应用。
- 鲁棒性:通过引入“边界管”概念,算法能够有效处理障碍物的运动,提高避障的鲁棒性。
- 多障碍物处理:算法能够同时处理多个动态障碍物,通过层次聚类和轨迹管理实现对多个障碍物的跟踪和避障。 |