个人卖家:
科技与几何感
创建于:2025-08-25
基于改进 Faster R-CNN 的城市道路路基缺陷智能识别算法
¥199.00
| 使用环境 |
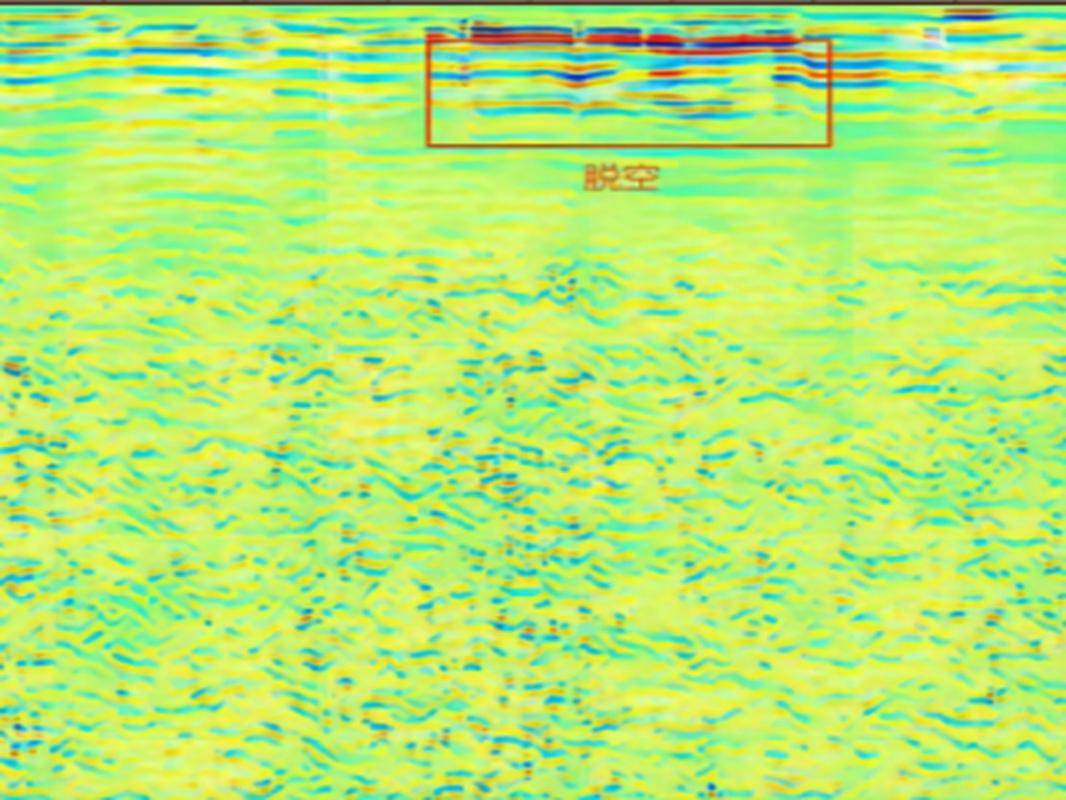
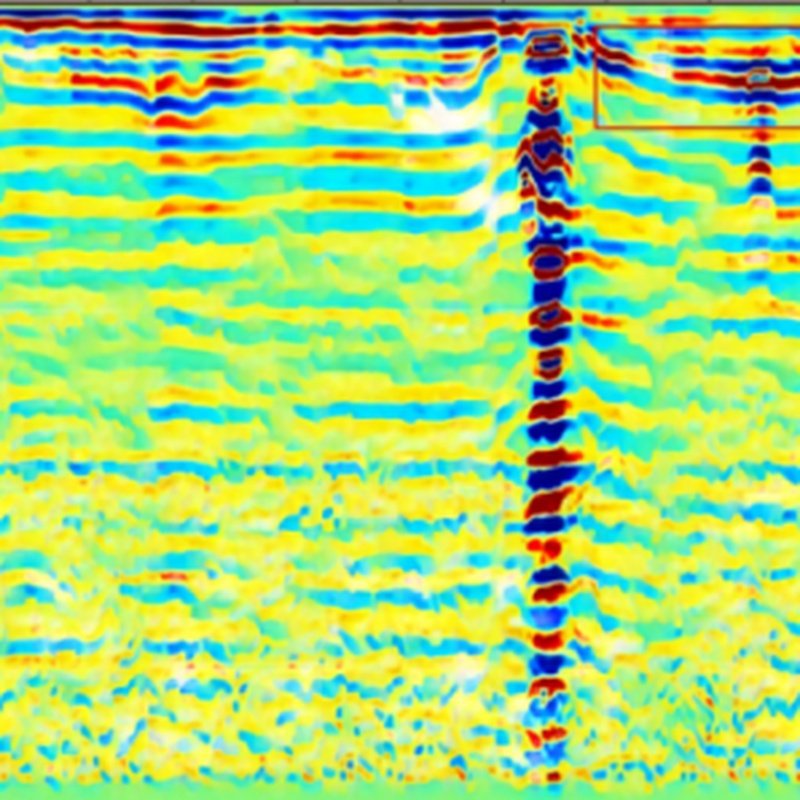
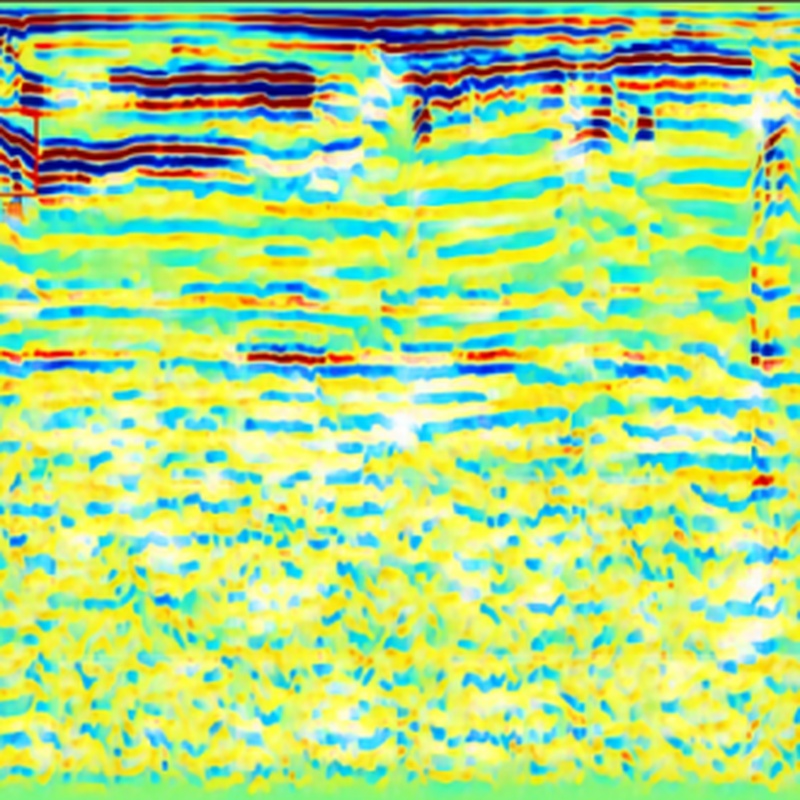
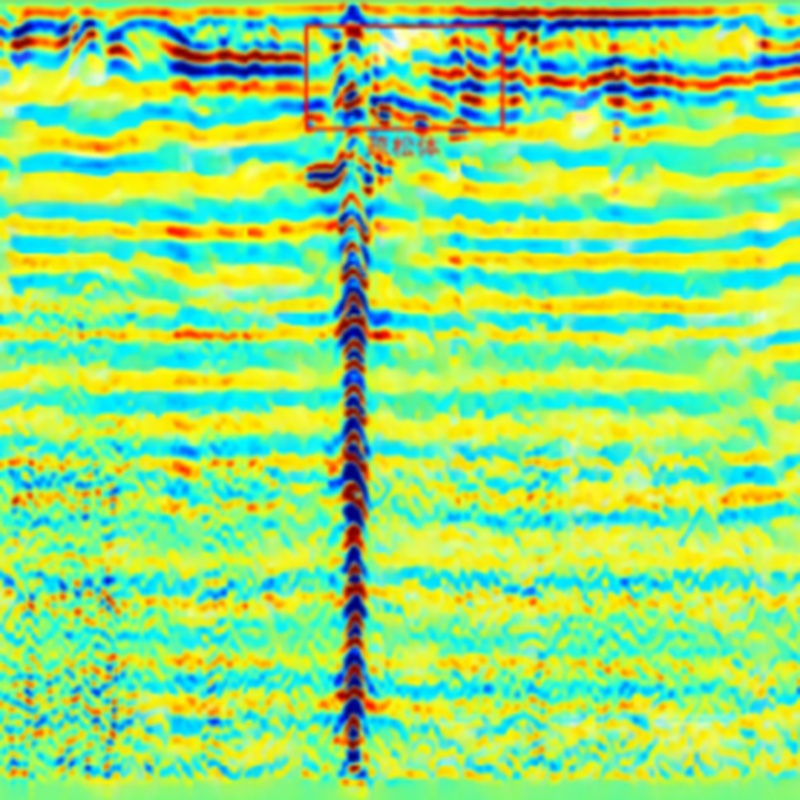
在城市道路检测场景中,使用地质雷达(GPR)进行非破坏性检测,通过 GprMax 前向模拟软件建立多层复合结构模型,模拟不同类型的路基缺陷,生成地质雷达图像数据。 |
| 使用对象 |
城市道路路基缺陷,包括松散路基、路基空洞、地下空洞、路面沉降和层间裂缝 |
| 使用目的 |
通过地质雷达图像的智能识别,快速、准确地检测和分类城市道路路基缺陷,提高道路安全性和维护效率,减少因路基缺陷导致的安全事故。 |
| 输入数据 |
地质雷达(GPR)图像数据,图像分辨率为 720×1280 像素。 |
| 输出数据 |
路基缺陷的类别(松散路基、地下空洞等)、缺陷位置坐标、缺陷区域信息。 |
| 硬件配置 |
CPU:Intel Core i7 处理器
GPU:NVIDIA GTX 1080
内存:16GB
数据采集设备:地质雷达(GPR) |
| 样本获取 |
使用 GprMax 前向模拟软件生成不同类型的路基缺陷图像,共 1140 张图像,图像大小为 720×1280 像素。将图像随机分为训练样本和测试样本,其中 80% 为训练样本,20% 为测试样本。 |
| 测试结果 |
在测试集上,改进的 Faster R-CNN 算法(faster_rcnn_inception_v2 版本)的区域识别准确率为 91.1%,总检测区域数为 425。 |
| 执行速度 |
改进的 Faster R-CNN 算法的训练速度约为每步 10 秒,测试速度约为每张图像 0.5 秒。 |
| 资源消耗 |
针对上述硬件配置,运行算法时,CPU 平均占用率约为 40% 50%,GPU 平均占用率约为 70% 80%,内存使用占比约 40% 50%,模型计算过程中产生的中间变量内存为约 1GB。 |
| 源码类型 |
Python 版本源码 |
| 文件大小 |
算法程序文件23K,权重文件22M |
| 相关备注 |
本算法基于改进的 Faster R-CNN 框架,通过结合地质雷达图像的前向模拟和深度学习技术,针对城市道路路基缺陷的智能识别进行了优化,能够有效解决路基缺陷检测的难题,在保证检测精度的同时,模型计算资源消耗低 |