个人卖家:
科技与几何感
创建于:2025-08-25
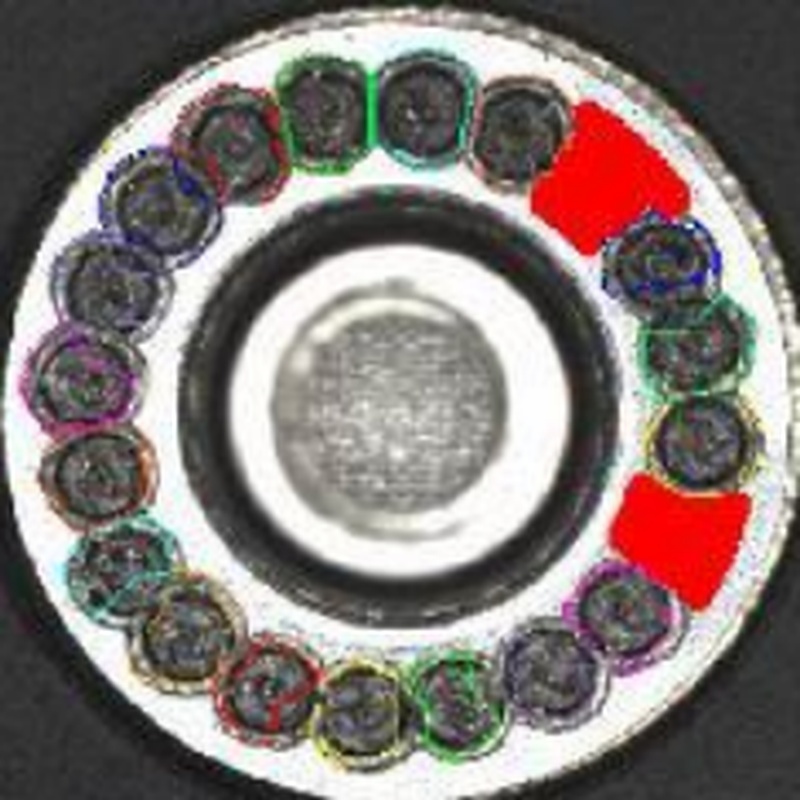
基于改进分水岭算法的焊缝识别与缺陷定位算法
¥399.00
| 使用环境 |
在工业机械部件的焊接检测场景中,使用灰度相机在特定检测区域同步采集工件图像,相机镜头距离工件约 30 - 50cm,镜头垂直于工件表面拍摄,图像分辨率为 2448×2048 像素,输入网络图像尺寸调整为 512×512 像素。 |
| 使用对象 |
焊缝及焊缝缺陷,如缺失焊缝等。 |
| 使用目的 |
快速、准确地识别焊缝并定位焊缝缺陷,提高焊接质量检测效率,确保机械部件的强度和结构可靠性,满足工业生产中实时检测的要求。 |
| 输入数据 |
工件的灰度图像帧 |
| 输出数据 |
焊缝的位置坐标、焊缝缺陷(如缺失焊缝)的位置坐标 |
| 硬件配置 |
CPU:Intel Core i7 处理器
GPU:NVIDIA GTX 1080
内存:16GB
摄像头:灰度相机(MV-CS050-90GM) |
| 样本获取 |
使用灰度相机在特定检测区域同步采集工件图像,共 1000 张图像,图像大小为 2448×2048 像素,网络输入图像尺寸调整为 512×512 像素。将图像随机分为训练样本、验证样本和测试样本,其中 70% 为训练样本,20% 为验证样本,10% 为测试样本。 |
| 测试结果 |
在测试集上,改进的分水岭算法的平均精度(mAP)为 92.3%,召回率为 93.5%。 |
| 执行速度 |
改进的分水岭算法的检测速度为 25 帧 / 秒。 |
| 资源消耗 |
针对上述硬件配置,运行算法时,CPU 平均占用率约为 40% 50%,GPU 平均占用率约为 70% 80%,内存使用占比约 40% 50%,模型计算过程中产生的中间变量内存为约 1GB。 |
| 源码类型 |
Python 版本源码 |
| 文件大小 |
算法程序文件 50KB,权重文件 1GB。 |
| 相关备注 |
本算法基于改进的分水岭算法,通过结合 Otsu 阈值分割、形态学处理、随机增量算法和距离变换等方法,针对工业机械部件焊缝识别与缺陷定位进行了优化,能够有效解决焊缝粘连、缺陷定位等问题,在保证检测精度的同时,模型计算资源消耗低,适合部署在工业检测设备上 |