个人卖家:
科技与几何感
创建于:2025-08-24
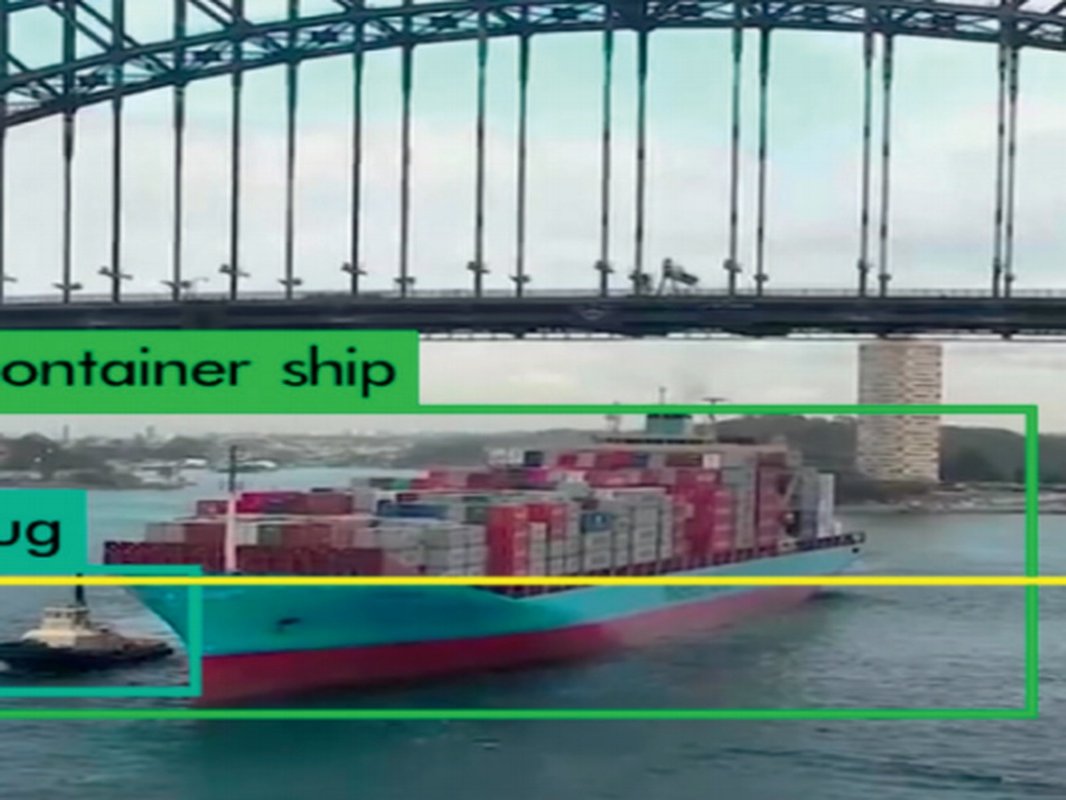
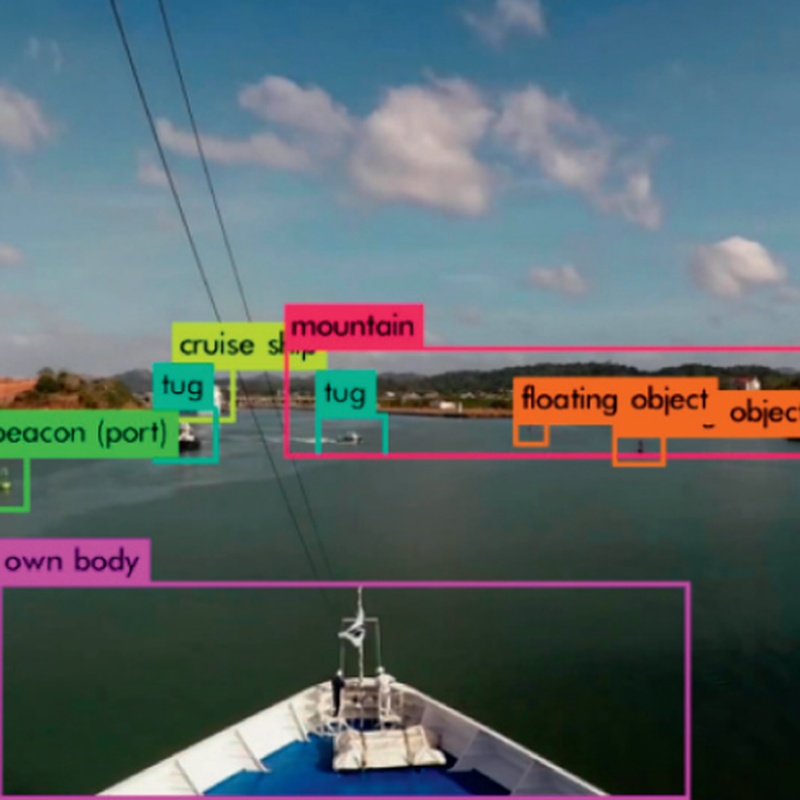
基于深度学习的海洋目标检测算法
¥200.00
| 使用环境 |
在海洋环境中,使用搭载高分辨率相机的设备(无人机、船舶)进行拍摄,拍摄图像的分辨率为1920×1080。该算法适用于不同光照条件、不同天气情况下的海洋图像处理,能够有效应对因海浪、设备抖动等因素导致的图像噪声问题。 |
| 使用对象 |
海洋中的各类目标,包括船舶、浮标、海洋垃圾、冰山 |
| 使用目的 |
自动检测海洋中的各类目标,提高检测效率和准确性,减少人工分析图像的工作量,为海洋监控、船舶导航、海洋资源管理等提供技术支持。 |
| 输入数据 |
海洋环境的可见光波段图像帧。 |
| 输出数据 |
目标的分类结果(船舶、浮标)、目标区域的分割图像、目标的位置坐标、目标的尺寸信息(长度、宽度)。 |
| 硬件配置 |
CPU:Intel Core i7-9700;GPU:NVIDIA GeForce RTX 2080;内存:16GB;拍摄装置:高分辨率相机,分辨率1920×1080;接口:USB 3.0,用于连接相机和传输数据;硬盘:1TB固态硬盘,用于存储大量图像数据。 |
| 样本获取 |
从实际海洋监控场景中获取图像数据,包括不同角度、距离、光照、模糊、遮盖等情况下的图像,共获取20000帧样本图像,其中5000帧用于训练集,15000帧用于测试集。 |
| 测试结果 |
对测试集中的15000个样本进行全面测试,漏检率为5%,误检率为2.5%。在mAP@0.5指标上,该算法达到了0.85,相比其他基础算法有显著提升。 |
| 执行速度 |
识别速度约5ms/次(基于上述硬件配置)。 |
| 资源消耗 |
针对上述硬件配置,运行算法时,CPU平均占用率约为35%-45%,GPU平均占用率约为65%-75%,内存使用占比约35%-45%。 |
| 源码类型 |
Python版本源码。 |
| 文件大小 |
算法程序文件35KB,权重文件60MB。 |
| 相关备注 |
本算法基于改进的YOLO系列模型,针对海洋目标检测进行了优化,在提高检测精度的同时,降低了模型复杂度,提升了推理速度,具有较高的工程应用价值。 |