| 现场环境 |
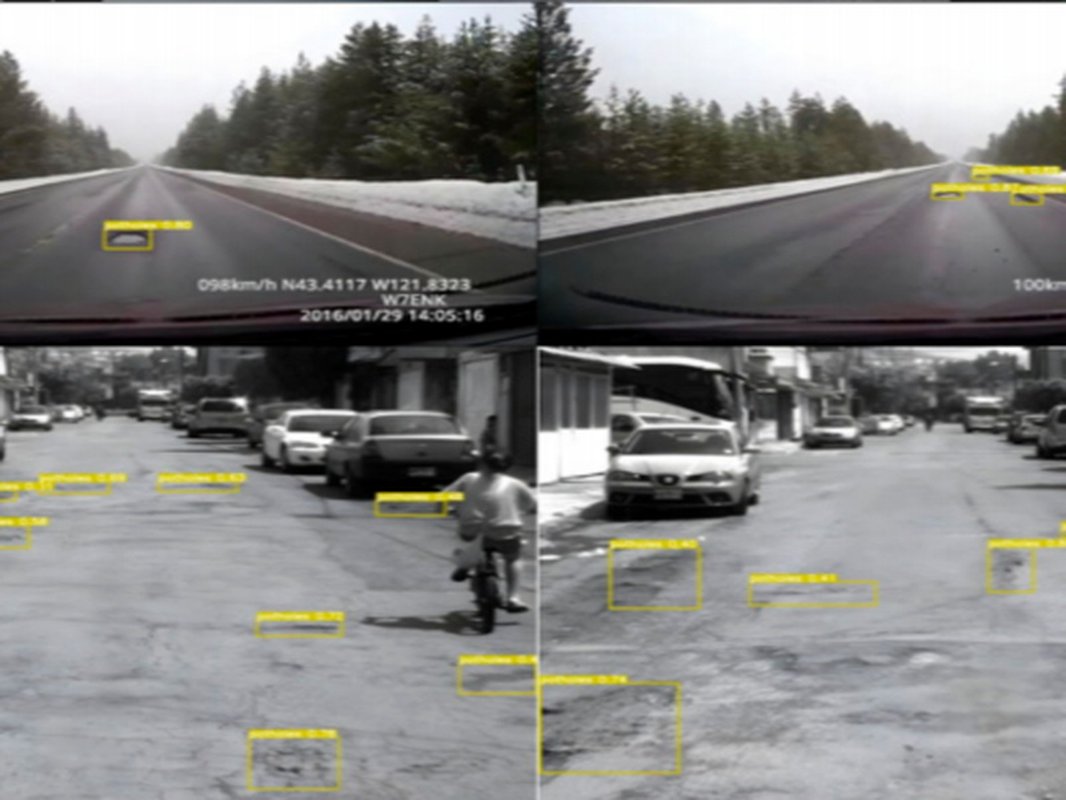
在户外道路场景中,车辆以45km/h - 90km/h的速度行驶,道路周围有自然光照,光照强度在一定范围内变化。使用普通摄像头安装在车辆上,距离路面一定高度,以一定角度向下拍摄路面图像,摄像头分辨率为1280×720等常见分辨率。 |
| 使用对象 |
马路上的坑洼(pothole) |
| 使用目的 |
通过检测马路上的坑洼,及时发现道路损坏情况,为道路维护提供依据,保障行车安全,减少因坑洼导致的交通事故和车辆损坏风险。 |
| 硬件配置 |
CPU:Intel Core i7 - 9700K,8核16线程;GPU:NVIDIA GeForce RTX 2080 Ti,具有较高的图形处理能力;内存:16GB DDR4,满足算法运行时的数据存储需求;拍摄装置:普通摄像头,分辨率1280×720; |
| 硬件兼容 |
无
|
| 软件配置 |
操作系统:Windows 10 64位专业版;依赖库:Python 3.8,TensorFlow 2.4.0,PyTorch 1.8.0等;编译器:Visual Studio 2019 |
| 软件兼容 |
无
|
| 输入数据 |
低分辨率的路面图像帧 |
| 输出数据 |
检测到的坑洼的坐标位置、尺寸、数量等信息 |
| 样本获取 |
在不同时间段、不同路段,以不同角度、距离、光照条件等采集车辆行驶过程中的路面图像,共采集1300张图像作为训练集,81张图像作为测试集,涵盖了各种常见场景下的坑洼情况。 |
| 测试结果 |
对测试集中的81个样本进行测试,ESRGAN + YOLOv5模型的平均精度(mAP)为97.60%,召回率为70%;ESRGAN + EfficientDet模型的平均精度(mAP)为100%,召回率为66.77%,整体表现良好,能有效检测出路面坑洼。 |
| 执行速度 |
ESRGAN + YOLOv5模型的检测速度约为30ms/次;ESRGAN + EfficientDet模型的检测速度约为35ms/次。 |
| 资源消耗 |
针对上述硬件配置,运行ESRGAN + YOLOv5模型时,CPU平均占用率约为70%,GPU平均占用率约为80%,内存使用占比约60%;运行ESRGAN + EfficientDet模型时,CPU平均占用率约为75%,GPU平均占用率约为85%,内存使用占比约65%。 |
| 源码类型 |
Python版本源码 |
| 文件大小 |
算法程序文件37K,权重文件72M。 |
| 相关备注 |
本算法基于深度学习技术,结合ESRGAN进行图像超分辨率处理,以及YOLOv5和EfficientDet进行目标检测,具有一定的创新性和实用性,可为道路坑洼检测提供一种有效的解决方案,但实际应用中还需根据具体场景进行适当的优化和调整。 |